”计算机视觉原创知识分享“ 的搜索结果

Road Mapping and Localization using Sparse Semantic Visual FeaturesCheng W, Yang S, Zhou M, et...

Unified Multi-Modal Landmark Tracking for Tightly Coupled Lidar-Visual-Inertial Odometry来源:Wis...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达标题:RoadMap: A Light-Weight Semantic Map for Visual Localization tow...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨元气满满的打工人来源丨CV研习社导读:在自动驾驶领域,激光雷达由于其稳定的性能且不易受外界环境的影响,一直是自动驾驶汽车的主要传...

作者丨Coulson@知乎来源丨https://zhuanlan.zhihu.com/p/55825255编辑丨3D视觉工坊一、引言最近在为车辆添加障碍物检测模块,障碍物检测可以使用激光雷...
2012年,AlexNet网络横空出世,带来了前所未有的深度学习革命,这也让多年来进展缓慢的计算机视觉CV研究,一下被按下了“快进键”。 人们突然发现,这种模拟人脑抽象和迭代过程的深度学习算法,让计算机开始“看见”...

3D视觉工坊致力于推荐最棒的工作机会,精准地为其找到最佳求职者,做连接优质企业和优质人才的桥梁。如果你需要我们帮助你发布实习或全职岗位,请添加微信号「CV_LAB」。公司介绍:雷博科技(R...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达来源丨小猪实验室这次将带大家学习如何使用深度相机实现机器人的视觉SLAM建图及导航。目录一、 概述1.深度相机2.常...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达今天要介绍的文章是“Back to the Feature: Learning Robust Camera Localization ...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨吕乐章来源丨计算机视觉life今天给大家分享一篇香港大学火星实验室最新的成果,题目是快速紧耦合的稀疏直接雷达-惯性-视觉里程计,英文标题:FAST-LIVO:...
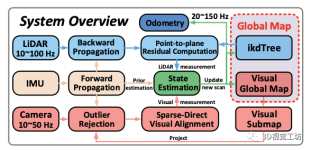
FAST-LIVO: Fast and Tightly-coupled Sparse-Direct LiDAR-Inertial-Visual Odometry本文提出了一种快速的激光视觉惯导融合的slam系统,可以分为LIO和VIO两个紧耦合的子系统。LIO直接把当前的扫描点和增量构建的...

来源丨汽车自动驾驶技术业务背景1.1 自动驾驶与高精度地图高精地图也称为高分辨率地图(High Definition Map, HDMap)或者高度自动驾驶地图(Highly Automated Driving Map, HAD Map)。近些年,随着自动驾驶技术...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达标题:Stereo Visual Inertial LiDAR Simultaneous Localization and Mapp...
转自 |睿慕课文章结构前言立体视觉传感器原理简介工业领域应用主流立体视觉的产品TOF相机工作原理TOF工业领域应用一些TOF研究机构1.前言在机器视觉应用中,物体三维形状的获取变得越来...

作者丨深蓝学院@知乎来源丨https://zhuanlan.zhihu.com/p/393348763编辑丨3D视觉工坊本文整理了当下主流的三维视觉(图像、点云)与自动驾驶数据集,数据集会...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨paopaoslam来源丨泡泡机器人SLAM标题:HybVIO: Pushing the Limits of Real-time Visual-inertial Odometry作者:Otto Seiskari, Pekka Rantalankila, ...
今日,向大家推荐我的个人微信公众号----深度学习技术前沿 公众号简介: 公众号:【深度学习技术前沿...推送有关于机器学习、深度学习、强化学习、计算机视觉、自然语言处理等领域干货文章,注重内容的原创分享,...
作者丨黄浴@知乎来源丨https://zhuanlan.zhihu.com/p/351965263编辑丨3D视觉工坊2021年2月15日上传arXiv论文:“OmniDet: Surr...
译者 | Major编辑 | 赵雪出品 | AI科技大本营(ID:rgznai100)导语:如果你没能参加 CVPR 2019 , 别担心。本文列出了会上人们最为关注的 ...
全世界只有3.14 %的人关注了爆炸吧知识美东时间2020年4月25日夜间,华人计算机视觉一代宗师,黄煦涛教授(Thomas S. Huang)在美国印第安纳州逝世,享年 84 岁。由...
本文共转载了四篇文章,从不同的角度从模式识别相关的期刊和会议作出了分析,分别如下 ... 第一章:会议 conferences 一般来说,学术会议会设置很多chairs,各种chairs职责不同。General chairs是负责组织会议的准备和...
图像视频、文本分析、知识图谱、推荐系统、问答系统、强化学习、机器学习、多模态、系统界面、爬虫、增量学习等领域…有需要的话,评论区私聊。
一、通过调用Matlab函数指令完成以下内容: 显示一张彩色图像分别在R、G、B三个颜色通道空间内的图像像素变化曲面; 显示要求1中图像的等值线图; 截取要求1中图像某区域,生成子图像,显示该子图像的直方图与茎...
本博客将实现Python版本的双目三维重建系统,项目代码实现包含:`双目标定`,`立体校正(含消除畸变)`,`立体匹配`,`视差计算`和`深度距离计算/3D坐标计算` 的知识点。限于篇幅,本博客不会过多赘述算法原理,...

作者丨David 拉燕 桃子来源丨新智元【导读】谷歌最新学术指标出炉!今年,AI顶会黑马迭出,CVPR仍保持总榜第4,ICLR和NeurIPS排名继续跃升。值得一提的是,ICCV、ICML直接挤进前20。一年一度的谷歌学术期刊和会议...

3D视觉工坊致力于推荐最棒的工作机会,精准地为其找到最佳求职者,做连接优质企业和优质人才的桥梁。如果你需要我们帮助你发布实习或全职岗位,请添加微信号「CV_LAB」。公司简介:西人马FAT...

3D成像方法汇总介绍:这里要介绍的是真正的3D成像,得到物体三维的图形,是立体的图像。而不是利用人眼视觉差异的特点,错误感知到的假三维信息。原理上分类:主要常用有:1、双目立体视觉法(S...

泡泡图灵智库,带你精读机器人顶级会议文章标题:DXSLAM: A Robust and Efficient Visual SLAM System with Deep Features作者:...

Visual and Visual-Inertial SLAM: State of the Art, Classification,and Experimental Benchmarkin...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达“6月11日至13日,第一届中国三维视觉大会(China3DV 2021)在厦门召开。大会定位于推动三维视觉理论、技术与应用的发展,助...