
”相机坐标系“ 的搜索结果

摄影测量学中的后方交会程序,用于解算相机坐标系与世界坐标系的旋转平移关系

相机标定——四个坐标系介绍
标签: 数码相机
世界坐标系是一个用于描述和定位三维空间中物体位置的坐标系,...相机坐标系是相机内部的一个坐标系,用于描述相机传感器内的图像信息。图像坐标系是指相机传感器成像平面的二维坐标系,即图像上的像素位置的坐标系。
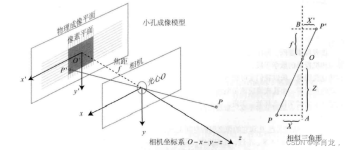
关于世界坐标系 相机坐标系 成像平面的一个很好的解释 同时也是对相机成像模型的一个解释



这些确实很重要但是因为个人原因,本文对相机坐标系转换到世界坐标系不作记录。
像素坐标,世界坐标,相机坐标之间的转换
图像坐标系如何转换到相机坐标系。
标签: 数码相机
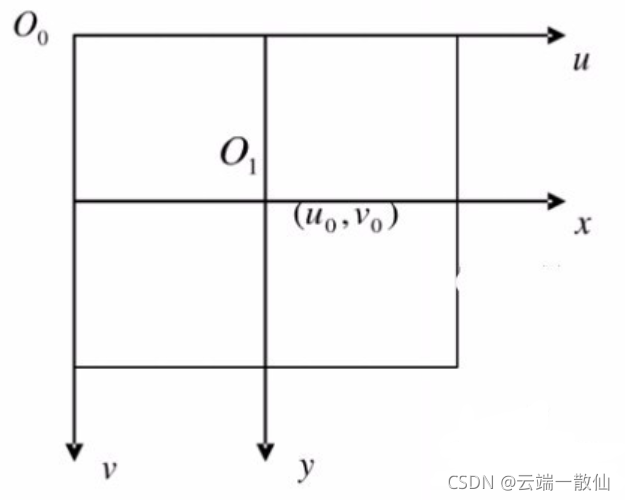
图像坐标系和相机坐标系之间是通过相似三角形进行建立关系的。这里物体在相机坐标系中的坐标是(X,Y,Z),物体在图像坐标系中的坐标是(X' , Y' )。图像坐标系是用于描述数字图像中像素位置的坐标系。相机坐标系是...
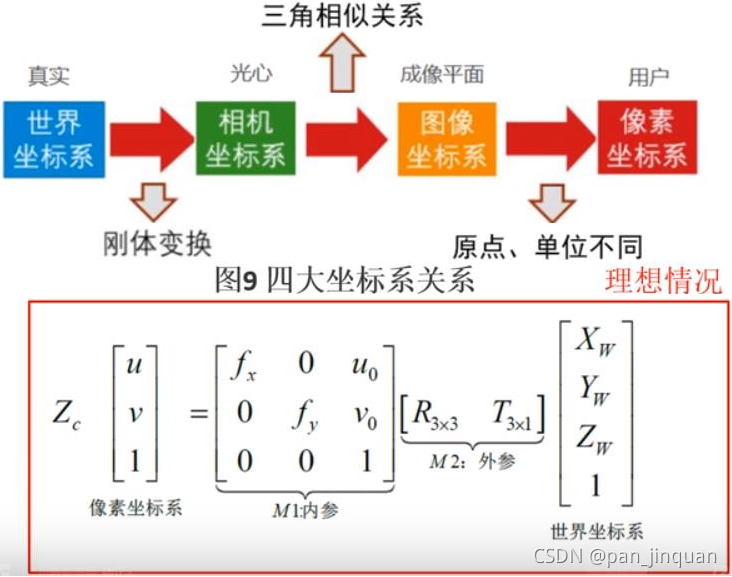
自动驾驶行业,相机投影中四个坐标系:世界坐标系,相机坐标系,图像坐标系和像素坐标系之间的转换关系讲解。
在计算机视觉和图形学中,相机内参矩阵通常用于将图像坐标系中的像素坐标转换为相机坐标系中的三维坐标,或者将相机坐标系中的三维坐标投影到图像坐标系中的像素坐标。在计算机视觉和图形学中,像素坐标系和相机坐标...




目录一、各坐标系简要介绍二、坐标系转换2.1 世界坐标系转为相机坐标系2.2 相机坐标系转为物理图像坐标系2.3 物理图像坐标系转为图像坐标系2.4 总结2.5 为什么要使用齐次坐标参考文献 一、各坐标系简要介绍 首先...
坐标变换:实现相机坐标系到相平面的变换,matlab环境下直接可用
已知相机外参 extr 和 相机坐标系下的点云 pc 求解世界坐标系下的 点云 pc 或 已知相机外参 extr 和 世界坐标系下的点云 pc 求解相机坐标系下的 点云 pc notes: 1. 一些经验之谈: 一般世界坐标系到相机坐标系的...
一、四个坐标系简介和转换 相机模型为以后一切标定算法的关键,只有这边有相当透彻的理解,对以后的标定算法才能有更好的理解。...我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v...

使用c++ 调用realsense相机,并进行像素坐标系到世界坐标系的转换。

1.我做了手眼标定之后,得到了坐标从相机坐标系到机械臂基坐标系的转换方法,但是如何得到坐标从像素坐标系到相机坐标系的转换关系,这样我就可以将坐标从像素坐标系转换到机器人基坐标系,就可以引导机器人抓取目标...
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地