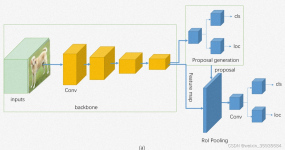
目标检测:Faster R-CNN——ROI Head模块介绍及源码笔记 目的:为RPN模块提供的每个proposal进行类别预测和回归参数的预测,预测对象类别和微调RPN预测出来的边界区域输入:特征图、proposal输出:物体类别以及对应...
”目标检测模块“ 的搜索结果
目标检测(Object Detection)的任务是找出图像中所有感兴趣的目标(物体),确定它们的类别和位置,是计算机视觉领域的核心问题之一。由于各类物体有不同的外观、形状和姿态,加上成像时光照、遮挡等因素的干扰,...
系列文章目录 ...本文先对**【无人驾驶autoware 项目实战】感知-目标检测模块**做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章 提示:以下是本篇文章正文内容 一、 1. 2. 3. 4. . .
电信设备-射频模块和移动目标检测模块.zip
目标检测YOLOv8代码实战(数据集:VisDrone)
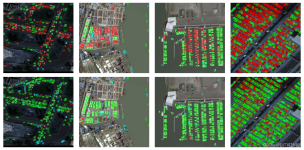
遥感是一种无需接触的远程空间探测技术,该技术是通过记录、测量、解析星载或机载传感器等非接触式传感器获取的影像信息和数字图像信息并真实可靠地构造出相关自然物体和周围环境等信息的一门科学和工程技术[1]。...
用opencv的dnn模块实现Yolo-Fastest的目标检测.zip用opencv的dnn模块实现Yolo-Fastest的目标检测.zip用opencv的dnn模块实现Yolo-Fastest的目标检测.zip用opencv的dnn模块实现Yolo-Fastest的目标检测.zip用opencv的...
一篇值得的参考的文档,主要讲解了java与OPenCV结合实现的目标检测模块,详细地讲述了利用JN1技术调用openCV目标检测方法的具体步骤和关键过程。
弱小红外目标检测中的“弱”指的是在背景较为复杂时,目标与背景特征相似,易被淹没在背景中,一般对比度小于15%,且在远距离成像中耗散了较多能量以致其信杂比(Signal-to-Clutter Ratio, SCR)不大于3;“小”是指远...
2.1.1两阶段水下目标检测算法目标检测算法主要分为两类:一阶段目标检测算法和两阶段目标检测算法。一般情况下,对于含有区域建议网络的两阶段目标检测算法具有较高的检测精度。本小节将详细介绍两阶段水下目标检测...
近年来,随着人工智能技术以及车载感知器件的快速发展,国内外许多传统汽车企业与互联网巨头强强联手,开始在自动驾驶的战场上布局。如图1-1所示,百度、特斯拉、谷歌以及华为等科技公司已经在自动驾驶领域取得了阶段...
公路作为我国基础设施建设,是国家经济快速发展的重要工程。随着公路建设规模的不 断增加、国家政策的大力扶持,未来我国公路建设将保持平稳发展。据交通管理部门统计,我国通车公路总里程数、公路覆盖密度、养护...

基于opencv的dnn模块做yolov5目标检测,包含C++和Python两个版本的程序.zip 代码完整下载可用。 基于opencv的dnn模块做yolov5目标检测,包含C++和Python两个版本的程序.zip 代码完整下载可用。基于opencv的dnn...
本文主要目的是实现在PINet车道线检测的代码中嵌入YOLOv8的目标检测模块
态物体的三维检测,但是激光雷达产生的点云(Point Cloud)只有位置信息,细节信。抗干扰能力非常强,但是因为毫米波雷达发射的波束量有限,导致接受的信号量很少,其中,相机可以提供车身周围丰富的色彩信息,帮助...


近年来,随着大数据、云计算、人工智能和自动驾驶等技术的发展,以图像和视频为载体的信息在互联网中的应用越来越广泛,以及在自然场景下获取到的信息大部分是图像,因此通过计算机进行视觉任务的处理显得越来越重要...

课程设计:使用OpenCV-DNN模块进行YOLOv4目标检测
可以通过摄像头或加载视频,进行目标检测,简单使用
以下是我实验的一些记录:持续更新中~
系统框架搭建+所有模块整合+目标检测和测距 图像预处理(摄像头校正) 全景图拼接 车道线提取与偏道预警 红绿灯及路标识别 3d模拟场景的车辆运行控制 系统框架搭建+所有模块整合+目标检测和测距
推荐文章
- DCM4CHEE CFind&CMove节点配置_dcm4che cmove findscu-程序员宅基地
- vs.Net2003无法打开或创建Web应用程序若干解决办法_.net2003 无法打开网站-程序员宅基地
- 【Android】自定义View / ViewGroup_android 自定义viewgroup-程序员宅基地
- Ansible-剧本与变量-程序员宅基地
- atmega 128 单片机 开发 例子 例程 教程 ADC PWM 呼吸灯_atmega128例程-程序员宅基地
- django框架启动时开启redis消息订阅_django redis 消息订阅-程序员宅基地
- linux嵌入式编程高手历程系列6-定制uboot和文件系统_dhcpc menuconfig-程序员宅基地
- Android系统版本号对照表_android版本号对应-程序员宅基地
- SeismoSignal-程序员宅基地
- XCTF 4th-QCTF-2018 pwn stack2 writeup_"puts(\"*give me your numbers and i will return to-程序员宅基地