前言:SLAM的系列实验基本就更新那么多,之后开始进入点云深度学习的方向,不出意外,这个系列会持续很久 点云深度学习最近一两年逐渐火热,这个系列从CVPR2017的PointNet开始,主要总结顶会的相关文章,不会全文...
”点云深度学习“ 的搜索结果
近期刚刚开始调研3D场景理解,下文是对point,point net++,frustum point 的一些整理和总结,内容包括如何将点云进行深度学习,如何设计新型的网络架构,如何将架构应用的3D场景理解。
Learning Representations and Generative Models for 3D Point Clouds (ICLR 2018)
Deep Learning for 3D Point Clouds: A Survey(三维点云深度学习研究综述) Guo Y, Wang H, Hu Q, et al. Deep learning for 3d point clouds: A survey[J]. IEEE Transactions on Pattern Analysis and Machine ...
注意:kitti数据集的label都是基于相机坐标系的。如果使用雷达的label,需要进行相机和雷达之间的矩阵转换。label——真值,错错错。...课程主要学习点云和体素,栅格网的不学。常见获取3D信息的方式。
而PointCNN作为点云数据的深度学习框架,通过局部特征和全局特征的协同学习,有效地提取了点云数据的特征。PointCNN通过局部特征学习层和全局特征学习层的设计,实现了局部感受野和全局特征的有效协同学习。这种协同...
1. 概念引入 permutohedra lattice (原文:Fast high-dimensional filtering using the permutohedral lattice 下述文字参考了:... 一个d维的permutohedral lattice是d+1维...
本文首先对点云分类方法研究现状进行了介绍,接着重点对基于深度学习的点云分类的主要方法和最新方法进行了分析阐述。根据数据处理方式对点云分类方法进行归类,总结对比了每类方法的主要思想和优缺点,并详细介绍了...
provider.py文件主要为PointNet提供数据加载以及点云预处理等功能 其import如下: import os import sys import numpy as np import h5py 紧接着import的是对数据目录的一些处理: BASE_DIR = os.path.dirname...
基于深度学习的点云匹配.pdf
请问有没有做点云深度学习的大佬哇,快被整疯了,这个点云文件的输入环节代码一直做不出来,json文件的生成啥的,都存在问题,有偿求助!!!
基于3D点云的深度学习方法近年来,随着计算机视觉和人工智能技术的发展,基于3D点云的深度学习方法在目标检测、物体识别和场景分析等领域取得了显著的进展。本文将介绍基于3D点云的深度学习方法,并提供相应的源代码...

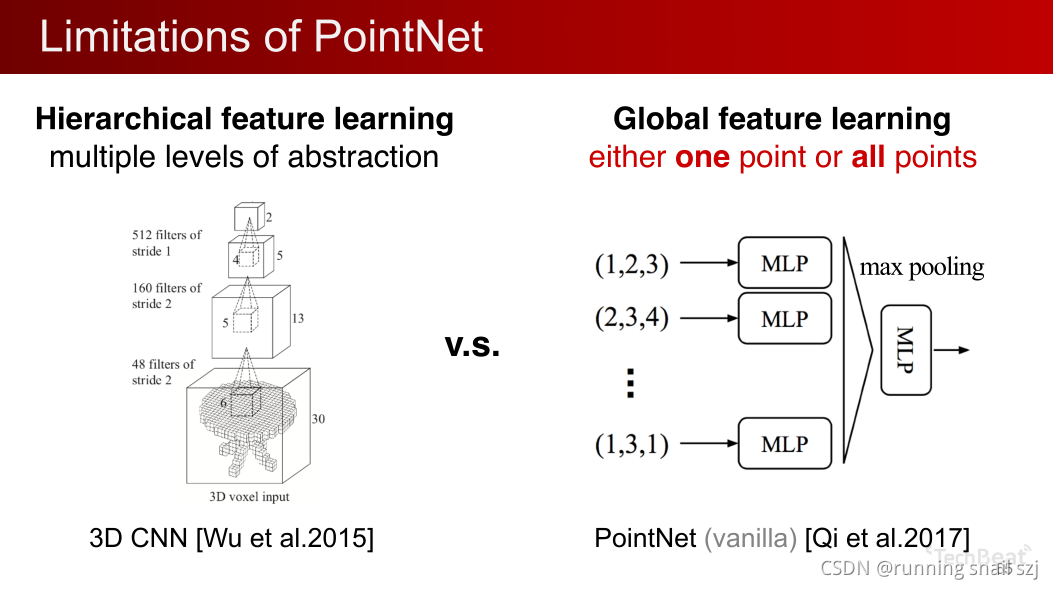
今天要聊的论文是斯坦福大学Charles等人在CVPR2017上发表的论文,提出了一种直接处理点云的深度学习网络——PointNet。这篇论文具有里程碑意义,标志着点云处理进入一个新的阶段。为什么会给这么高的评价呢? ...
基于深度学习的三维点云识别 一、什么是三维物体识别 随着三维成像技术的发展,结构光测量、激光扫描、ToF等技术趋于成熟,物体表面的三维坐标能够精准而快速的获取,从而生成场景的三维数据,能够更好地感知和...
初始n*d的点云,首先经过输入特征提取块(3卷积层,每层64个1*1滤波器),输出n*din大小的特征Fin;通过x、y、z三个方向的切片池化层将无序点云转换为有序序列;采用双向RNN处理序列,更新特征;采用切片上池化层映射...
近年来,深度学习技术已成为计算机视觉、语音识别、自然语言处理、生物信息学等领域的研究热点,然而,三维点云的深度学习仍然面临着数据集规模小、维数高、非结构化等诸多挑战三维点云。在此基础上,本文对基于
PointNet++ 是一种基于深度学习的点云处理框架,它通过有效地表示和学习点云数据,提供了一种强大的工具来解决点云相关的任务。PointNet++ 是 PointNet 的升级版本,它在保留 PointNet 简洁性的基础上,进一步提高了...
分享视频教程——深度学习-3D点云实战系列,2021最新课程,完整版,附源码和数据集,想学习点云的同学抓紧时间下载了,很棒的一套课程
自动驾驶中深度学习点云分割和代码,另外还包含了自动驾驶学习资料 涵盖感知,规划和控制,ADAS,传感器;
深度学习点云配准 包括benchmark,iteration benchmark 参考:https://zhuanlan.zhihu.com/p/289620126?utm_source=wechat_timeline&utm_medium=social&s_r=0
https://www.cnblogs.com/li-yao7758258/p/8182846.html


【深度学习】为什么三维卷积数据量大 我们可能会经常听到在三维领域深度学习的参数量会非常庞大,以至于三维卷积的深度学习方不太适用。那么三维深度学习的参数量究竟是什么情况,本文将进行具体分析。 上一节,...
点云特征学习(二)–SPG...在SPG工作时间节点之前,PointNet,PointNet++等深度学习方法虽然能够较好完成点云语义分割任务,但是受限于点云输入大小规模的限制,无法在大规模语义分割任务中也保持同样的优异表现。为了
基于深度学习的方法主要是通过使用深度神经网络来实现点云的语义分割,其中点云的每个点作为网络的输入,网络输出每个点的语义类别。基于图的方法主要是通过构建点云的图模型来实现语义分割,其中点云的每个点作为图...
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地