CVPR2020:三维点云无监督表示学习的全局局部双向推理 Global-Local Bidirectional Reasoning for Unsupervised Representation Learning of 3D Point Clouds 论文地址: ...
”点云深度学习“ 的搜索结果
为此,我们提出了一个深度网络来简化3D点云。 称为S-NET的网络采用一个点云,并生成针对特定任务进行了优化的较小的点云。 不能保证简化的点云是原始点云的子集。 因此,我们在后期处理步骤中将其与原始点的子集...
论文:基于深度学习的点云分类方法综述 1、引言 由于 3D 点云的无序性、非结构化、密度分布不均,以及传感器噪声高、场景复杂等因素,3D 点云分类依然是一个极具挑战性的问题。 一般来说,点云分类任务分为两个步骤...
目录00 引言01 点云特征提取与匹配1.1 传统点云特征提取1.2 点云深度学习1.3 点云卷积1.4 稀疏卷积1.5 点云Transformer1.6 点云旋转不变特征提取1.7 点云匹配02 场景点云语义分割2.1 场景表征与数据集2.1.1 室内场景...
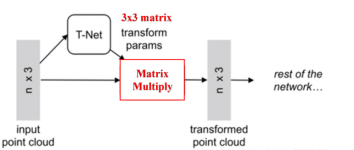
在深度学习的发展过程中,PointNet++是一种用于点云数据分类的深度学习网络模型,它在处理无序的点云数据方面表现出色。首先,将点云数据转换为规范的格式,例如将点云数据存储在N×3的矩阵中,其中N是点的数量,每...
3D视觉领域目前正蓬勃发展,针对原始三维点云数据的处理成为新的研究热点。本篇文章小小的陈述一下个人对这方面的一些理解。 三维点云处理的挑战 卷积在二维图像的处理中显示出了极大的优势,相比于人工构造...
基于深度学习的三维点云重建.pdf
标签: css
..
..
近年来,深度学习技术已成为计算机视觉、语音识别、自然语言处理、生物信息学等领域的研究热点,然而,三维点云的深度学习仍然面临着数据集规模小、维数高、非结构化等诸多挑战三维点云。在此基础上,本文对基于点云...
dd
深度学习几种上采样方法代码,最近邻插值,双线性插值,pixelshuffle,unpool,逆卷积等示例代码
PointMVS利用点云直接处理多视角场景重建,在深度粗估计的基础上通过PointFlow的方式迭代优化深度图,实现了高精度的三维重建结果。

深度学习在点云分类中的研究综述.pdf
深度相机获取的三维点云数据,可以用于机器人环境建模。
例如,PointNet Autoencoder [源代码链接] 使用PointNet网络结构实现了点云的编码和解码过程,通过学习点云的低维表示来补全缺失的部分。例如,PCN [源代码链接] 提出了一种基于生成对抗网络的点云补全方法,通过...
2.PointNetGPD抓取位姿检测网络对点云局部几何特征不敏感,抓取精度不高。其次,对于激活层和全连接层,本文优化了激活函数和分类损失函数的搭配,使得特征和。本文:完整预处理流程,保证点云的精简性。的抓取数据...
[日本人]在本例中,3D 点云通过深度学习点云学习方法(PointNet)进行分类。 PointNet [1] 将点云作为输入并返回其类别。此示例基于 MATLAB 官方文档 [2]。 iPad LiDAR 获取的点云作为样本数据。用作训练数据和测试...
将点云文件和标签文件组合起来生成hdf5文件,用作深度学习的训练集

点云算法的学习基础,入门方法,相关领域,资源,开源库,算法等的介绍; 以Open3D和PCL等为基础工具的点云处理代码讲解、实现;
Learning3D是一个开源库,支持处理3维数据的深度学习算法的开发。Learning3D有在python中目前效果好的深度神经网络。为了进一步开发,这里提供了模块化的代码。欢迎开源社区的贡献。
。。。
。。。
English |PAPC 欢迎使用PAPC(Paddle PointCloud),它是基于纯PaddlePaddle的点云平台的深度学习。表演模型动物园克拉斯赛格PointNet ++ SSG PointNet ++味精 探测点RCNN 点桩建设 数据集基于ShapeNet数据集(.h5...
构建自己的点云数据集(附代码)
3D目标检测数据增强
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地