
”机械臂控制相关“ 的搜索结果

而在机械臂的控制中,Matlab GUI提供了一个直观、易用的界面,使得用户能够方便地控制和监测机械臂的运动。这涉及到与机械臂的硬件接口和通信协议,具体要根据具体的机械臂型号和通信方式进行配置。在完成GUI的设计...
机械手臂类机器人应用存在的问题
标签: 机器人
机械手臂类机器人在实际应用中存在若干问题,其中一些常见的问题包括: 精度问题:机械手臂类机器人在运动过程中容易出现精度误差,导致其无法按照预定的精度完成任务。 力矩问题:机械手臂类机器人的力矩一般不够...


本文考虑了受不可测谐波干扰影响的机械手输入约束下的跟踪控制问题。 针对该问题提出了一种新的控制方案,该方案由参数相关的非线性观测器和跟踪控制器组成。 基于内模原理设计的基于参数的非线性观测器可以实现对...
基于stm32的视觉和蓝牙控制F407芯片智能机械臂控制小车

这个ROS melodic工作区是在Ubuntu 18.04上创建的。在这里,我已经在几个moveit相关的项目,如挑选,放置,浇注任务为多机械手系统使用moveit任务构造器(MTC)。
论1.1 本课题研究的背景及意义1.2 机械臂在工业的应用现状1.3 本课题研究内容第二章 机械臂工作流程2.1 步进电机工作的基本原理2.2 按键控制步进电机工艺流程2.3 本章小结第三章 机械臂控制系统介绍3.1 基于Arduino...
首先根据数控机械臂系统的自动控制功能要求,通过kinect等双目定位摄像头自动拍摄一段视频或背景图片,然后存储到视频存储器中,通过视频图像信息处理技术系统自动去除视频背景图像信息,可以用于抓取目标物体,可以...
STM32电位器控制舵机实现同步机械臂 序言 硬件部分 软件部分 最终效果 总结 序言 毕设的最初灵感是源于B站的一个转载视频 Micro Servo-robot 由于鄙人拙笨加上之前的软硬件基础较差,最终花了一段时间使用STM32才...
总之,本文通过对机械臂轨迹跟踪控制的研究,介绍了2自由度机械臂和6自由度机械臂的轨迹跟踪控制方法,并结合强化学习DDPG算法实现了自适应的机械臂轨迹跟踪控制。2自由度机械臂轨迹跟踪控制,6自由度机械臂轨迹跟踪...
本文使用的环境:Linux版本:Ubantu20.04ros版本:ros-noetic-desktop-full,安装此版本ros无需再安装moveit运动规划库编译软件:vscode。
基于MATLAB的机械臂运动学、动力学建模,轨迹规划以及运动控制仿真的相关代码

Winform 机械臂控制指的是通过Winform(一种微软 .NET Framework 下的GUI应用程序开发工具)来实现对机械臂的控制。这种控制方式通常会结合串口通信或者网络通信,通过编写Winform应用程序来发送控制指令,从而实现...


总之,二自由度机械臂滑模控制自适应分数阶滑模控制器是一种有效的机械臂控制方法,能够提高系统的控制性能和稳定性。在滑模控制中,自适应方法的引入可以进一步提高系统的控制性能,提高系统的适应能力和鲁棒性。
2、适用人群:主要针对计算机相关专业(如计科、信息安全、数据科学与大数据技术、人工智能、通信、物联网、数学、电子信息等)的同学或企业员工下载使用,具有较高的学习借鉴价值。 3、不仅适合小白学习实战练习,也...
主要花费是3d打印的开源机械臂,170-180左右。控制芯片使用:Wemos D1 R32 ESP32 +Arduino CNC Shield v3工具使用 arduino + ESP32 + AccelStepper 库进行开发目前还有一点抖动,估计是电压过高导致的,使用了24v...
SCARA机器人 机械手臂 写字机 DIY、教学、视觉识别、遥控机器人一、机器人手臂的结构这款(scara)机械臂的设计考虑了五个调节因素:使其“可打印”与市场上任何3D打印机,无论其功能或限制使用MAKER/3D打印机世界的...
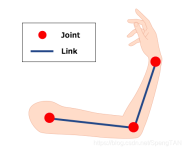
前言:近年来,随着服务机器人的兴起,机械臂也正走进我们的日常生活,近年来出现了一些低成本的、小型的、“桌面版”的机械臂的产品,相信这将是服务机器人的一个重要方向!机械臂由很多连杆(金属杆),和关节...
环境:noetic硬件:AR4机械臂。
2、适用人群:主要针对计算机相关专业(如计科、信息安全、数据科学与大数据技术、人工智能、通信、物联网、数学、电子信息等)的同学或企业员工下载使用,具有较高的学习借鉴价值。 3、不仅适合小白学习实战练习,也...
工业机械手的PLC控制
标签: 自动化

推荐文章
- c语言课程图书信息管理系统,c语言课程设图书信息管理系统.doc-程序员宅基地
- webpack4脚手架搭建1——打包并编译es6_webpack编译es6语法打包-程序员宅基地
- 信息通信服务、电子商务及物流服务的创新与发展_信息通信,电子商务-程序员宅基地
- websocket.js的封装,包含保活机制,通用_websocket保活-程序员宅基地
- Ubuntu安装conda-程序员宅基地
- LoadRunner性能测试关注指标及结果分析_loadrunner性能指标分析-程序员宅基地
- java怎么做图形界面_java怎么做图形界面?实例分享-程序员宅基地
- eMMC常识性介绍N_emmc温升系数-程序员宅基地
- MATLAB算法实战应用案例精讲-【人工智能】机器视觉(概念篇)(最终篇)-程序员宅基地
- Mac电脑如何串流游戏 Mac上的CrossOver是串流游戏吗 串流游戏是什么意思 串流游戏怎么玩 Mac电脑怎么玩Steam游戏_macos steam和crossover steam区别-程序员宅基地