随着工业生产技术的迅猛发展,机械臂在制造业中的地位越来越突出。...然后,针对二自由度机械臂设计PD控制器,并基于S函数在MATLAB中搭建Simulink控制图,对采用PD控制的机械臂的轨迹跟踪性能进行了仿真研究。
”机械臂控制相关“ 的搜索结果
基于stc89c52的机械臂控制系统,包含测温,实时时间显示,控制舵机步进电机,lcd1602显示参数等多种功能能
机器人操作系统ROS(九):MoveIt!与机械臂控制
液压机械臂控制综述
标签: 液压 机械臂 运动控制
这是关于液压机械臂运动控制的综述,介绍的比较详细。然后里面主要介绍了相关的研究和取得得进展。后面有详细的参考文献
包含了几篇有关迭代学习控制算法在机械臂控制,伺服阀控制中的应用。有几篇是外文文献,希望能够为不能从数据库下载文件的朋友提供一点帮助
基于STM32的六轴机械臂控制源码(含open mv颜色识别+识别不同的物块分放)+超详细注释.zip基于STM32的六轴机械臂控制源码(含open mv颜色识别+识别不同的物块分放)+超详细注释.zip基于STM32的六轴机械臂控制源码(含open...
机械臂完整的操作界面,包含动力学以及运动学
机械臂的外文文献以及翻译.pdf
标签: 技术
机械臂的外文文献以及翻译.pdf
这是一个四轴器械臂练手项目,定为arm0.1版本,使用MG90s舵机来搭建一个四轴机械臂。arm0.1版本的目标是对带颜色的方块进行识别并在Gazebo中模拟出来。以下是这个ROS四轴机械臂控制的目录,因为b站不支持Markdown...
在水下或者恶劣环境作业的机械手,在特定的时候需要远程控制。网络远程控制机械手进行作业成为了可能。 在远程控制中,通信是值得讨论的技术问题。传统的通信只是局限于脱离网络的通信,如两个 PC 机之间通信,或者...
六轴机械臂-正解+逆解+轨迹规划实现发布时间:2019-04-19 22:49,浏览次数:765之前,写了一篇博客,从坐标系的说明 -> D-H参数表的建立 -> 正解和逆解的整个算法推导过程整理了一篇博客...

本文以远程控制作业机械手的实例,介绍了远程串行通信的基本架构及实现过程,分析了直接控制机89C51硬件及其软件的设计与实现。 关键词:远程;串行通讯;单片机;机械手 0引言 网络化操作和远程控制成为很多...

总的来说,myCobot 280 2023是一款具有多种新功能和改进的机械臂,大大增强了其性能和应用范围。除了提升通信速度、支持 ROS2、避免自干扰碰撞外,我们还推出了 AI Kit 2023,将机器视觉与机械臂相结合,实现类似...
本机械手设计为两部分,硬件和软件。通过硬件和软件做成一款智能化产品,功能上更为创新,可以通过电脑进行实时监控和修改修改相关参数。在控制策略上优先采用摄像头方案,对抓取的物体实时监控和数据分析,通过运动...
基于非线性模型预测控制的移动机械臂运动规划与控制Python源码+使用说明(支持docker部署).zip 基于(非线性)模型预测控制的移动机械臂(mobile manipulator)运动规划与控制。 安装 ## 1. 使用Docker进行部署(推荐...
针对柔性关节机器人控制系统中存在的扰动力、摩擦力、参数变化以及建模误差等问题,将扰动力分为确定...在HIT四自由度柔性机械臂上进行了控制器的相关实验,实验结果表明,该控制器具有良好的位置跟踪性能和较强的抗干
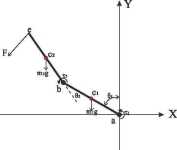
二自由度机械臂运动建模: 末端位置E(x,y),则两个关节角度可以由下式求得: theta1=atan2(y,x); % theta1=acos(x/sqrt(x*x+y*y)); c=sqrt(x*x+y*y); % 末端到原点的距离 theta3=acos((c*c+a*a-b*b)/(2*a*...

电子设计大赛相关的资源,如果您觉得这些资源对您有帮助的话,我会非常感谢您的支持,您可以考虑给我点赞或关注,这将是对我分享内容的一种鼓励,也会让我更有动力继续分享更多有价值的资源。非常感谢您的关注和支持...

逻辑控制节点是实现我们逻辑功能的核心,即调用图像处理,和夹爪移动服务来夹取目标放到相应的位置。
本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。随着电子技术和计算机技术的迅猛发展...

推荐文章
- Java基本数据类型与数组(二) (int类型数组默认值为0、trim()的作用、Sring和StringBuffer的区别(转载)、访问无效数组下标时的问题、各类数组的初始值)_当访问无效的数组下标时-程序员宅基地
- Python 容器型数据类型基本认识_python容器数据类型-程序员宅基地
- IIS系列通配符证书HTTPS多域名配置两种方法_iis域名通配符-程序员宅基地
- js中Set基本使用_js set-程序员宅基地
- 第5章:本章小节(MATLAB入门课程)-程序员宅基地
- win11 搭建Apache webdav 设置用户名密码 加密授权访问以及多个不同目录访问-程序员宅基地
- 全景分割论文阅读:MaX-Deeplab:End-to-End Panoptic Segmentation with Mask Transformers_max-deeplab: end-to-end panoptic segmentation with-程序员宅基地
- IBM SPSS Modeler 【3】 Kohonen聚类分析和直接分析法-程序员宅基地
- java毕业设计 ssm驾校预约管理系统(含源码+论文)_java毕业设计驾校报名系统-程序员宅基地
- CLion MinGW 快速配置 OpenGL GLUT 环境的方法(配图)_clion 导入glut-程序员宅基地