创立PerceptIn之前在百度美国研发中心工作,负责无人车系统架构及产品化。 张伟德,百度美国研发中心高级架构师。曾在弗吉尼亚大学网格计算小组担任研究员,在Yahoo!、微软等公司负责大型分布式搜索构架设计。目前...
”基于ROS的无人驾驶系统“ 的搜索结果
本文于来源于网络,介绍了基于机器人操作系统ROS的无人驾驶系统,并分析了它的优缺点和可靠性等知识。本文是无人驾驶技术系列的第二篇。在上篇解析光学雷达(LiDAR)技术之后,本文着重介绍基于机器人操作系统ROS的...
轨迹跟踪主要分为两类:基于几何追踪的方法和基于模型预测的方法。而pure pursuit算法就是最基本的基于几何的控制算法,因其鲁棒性高,对路径的要求低而广泛使用,也为后续的standly、LQR、MPC算法打好基础。因为纯...
设计了一种基于stm32的快递小车控制系统,实现对小车的运动控制和环境感知。系统采用了stm32开发板作为控制核心,结合电机驱动模块、传感器模块、语音与远程控制模块等多种硬件部件,构建了一个稳定、可靠和灵活的...
ROS机器人在无人驾驶领域的应用
标签: 机器人
在这些领域中,Robot Operating System(ROS)是一个非常重要的开源软件框架,它为无人驾驶领域提供了丰富的功能和资源。本文将从以下几个方面进行讨论: 背景介绍 核心概念与联系 核心算法原理和具体操作步骤以及...
ROS中的自动驾驶与无人驾驶技术
标签: 硬件开发
# 1. 简介 ## 1.1 ROS(机器人操作系统)概述 ROS(Robot Operating System,机器人操作系统)是一个用于编写机器人软件的开源框架。...自动驾驶与无人驾驶技术是近年来快速发展的前沿领域,它将计算机视觉、机器
分享【无人驾驶系列】基于ROS的无人驾驶系统 ppt教材
基于ROS构建无人驾驶车辆环境感知系统,文档描述对于基于ros开发有较大的帮助
无人驾驶系统是一个复杂的系统工程,在它的整个研发流程中,测试工作至关重要同时也繁重复杂。显然将全部测试工作都集中在真车上进行是一种成本异常高昂且安全系数非常低的方案。通过综合考虑测试中各种可能发生的...
毕设参考论文知识点
在上篇解析光学雷达(LiDAR)技术之后,本文着重介绍基于机器人操作系统ROS的无人驾驶系统。文中将介绍ROS以及它在无人驾驶场景中的优缺点,并讨论如何在ROS的基础上提升无人驾驶系统的可靠性、通信性能和安全性。 ...
目前无人驾驶系统的实际实现仍然依赖于ROS,作为一个相对成熟的机器人软件平台,ROS虽然存在一些缺点,在无人驾驶系统的系统实现上,ROS仍然是开源框架中最好的选择,这也是为什么诸如Apollo,Autowa...
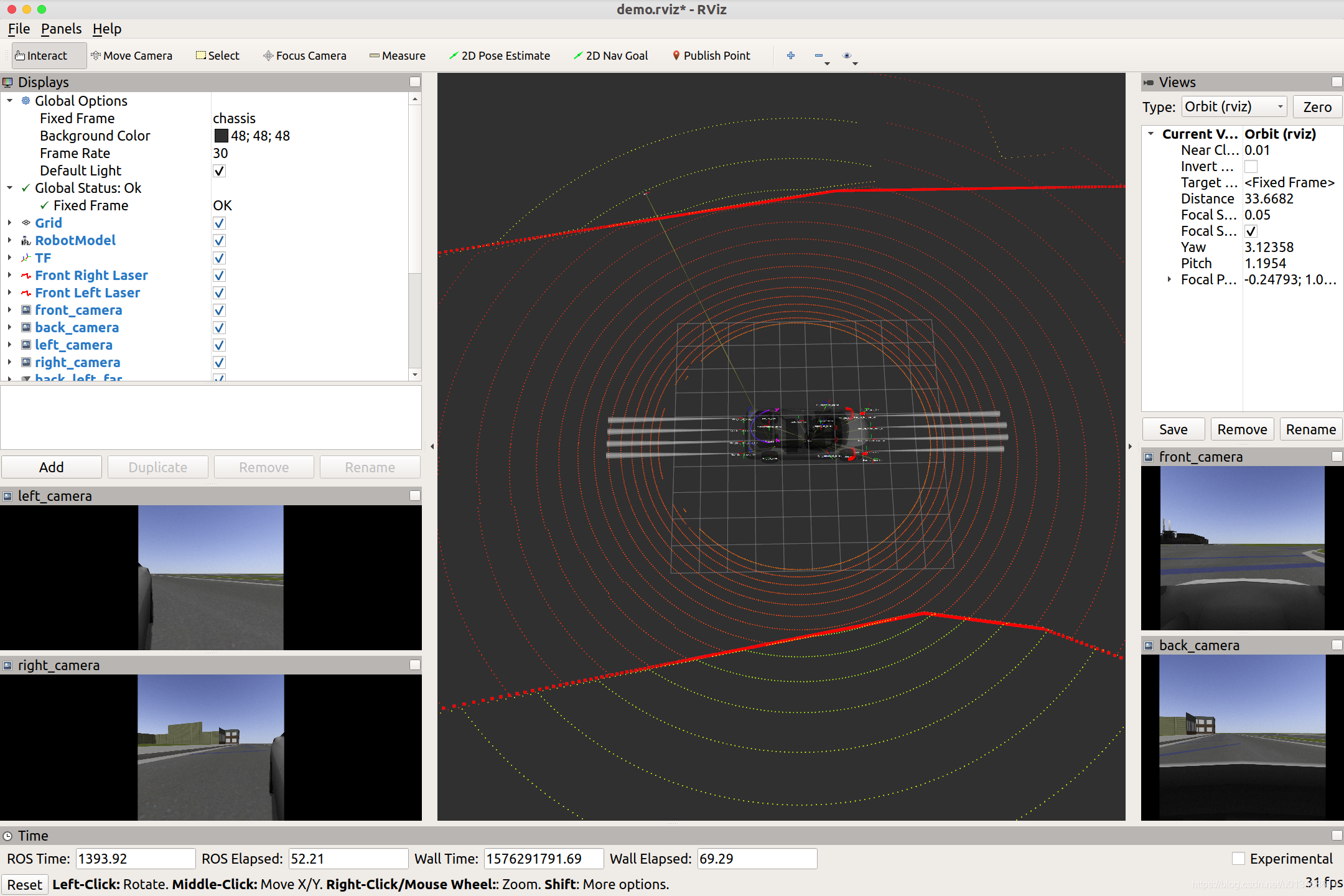
(ROS),我们创建了用于交通灯检测和分类、轨迹规划和控制的节点。 超出要求 在汽车运行时重新加载 PID 参数以加快调整速度 具有多个连续行为的轨迹规划,以便轨迹规划器在低频下工作良好 RViz 可视化汽车、交通灯和...


知识回顾 -上周我们介绍了Apollo控制技术——控制器的类型。主要介绍控制器的类型,大致分为三类,分别是开环控制、前馈环控制和后馈环控制。 其中详细地讲解了前馈环控制器的分类...自动驾驶系统包括障碍物检测、行为
无人驾驶汽车系统入门(二十五)——基于欧几里德聚类的激光雷达点云分割及ROS实现 上一篇文章中我们介绍了一种基于射线坡度阈值的地面分割方法,并且我们使用pcl_ros实现了一个简单的节点,在完成了点云的地面分割...
系统整合 该项目是Udacity无人驾驶汽车工程师Nanodegree的顶峰项目
1. 为什么要基于ROS编写代码? 使用其他的机器人操作系统均可,本博客使用基础的ROS平台。 2. 需要做哪些准备? windows:完整的prescan仿真模型,包括车辆,环境 linux:ROS1.0完整版本 3. ROS工程代码: (1...
purepursuit方法是基于几何追踪的路径追踪方法,基于几何的控制方法较为简单和直接,不用考虑车辆的运动学模型和动力学模型,控制时使用的参数少,能够较好的运用到实践使用中。最常用的两种方法是purepursuit方法和...
无人驾驶汽车系统入门(二十四)——激光雷达的地面-非地面分割和pcl_ros实践 在无人驾驶的雷达感知中,将雷达点云地面分割出来是一步基本的操作,这一步操作主要能够改善地面点对于地面以上的目标的点云聚类的影响...
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地