”六轴机械臂控制原理图“ 的搜索结果
该设计主要讲述运用直流伺服反馈控制系统控制六轴机器手臂运动,该直流伺服反馈系统电路使用新唐M451单片机作为主控制芯片,同时利用直流伺服马达连成单轴运动系统,具有定位功能、过电流,过电压保护功能、具通讯...
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752一、简介在ROS平台下使用MoveIt进行机械臂控制时,默认调用...
原标题:六轴工业机器人工作原理解析常见的六轴关节机器人的机械结构如图1所示:六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心...
六轴机械臂-正解+逆解+轨迹规划实现发布时间:2019-04-19 22:49,浏览次数:765之前,写了一篇博客,从坐标系的说明 -> D-H参数表的建立 -> 正解和逆解的整个算法推导过程整理了一篇博客...

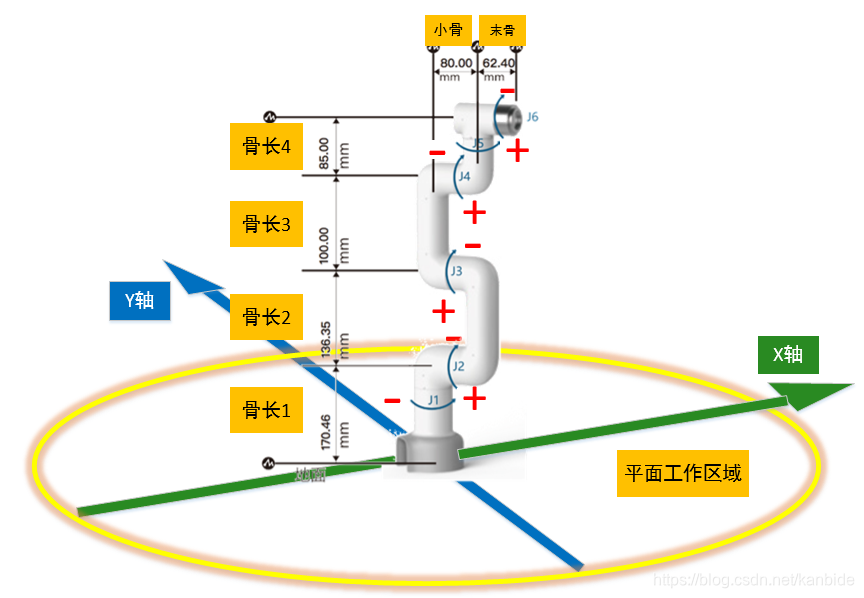
六轴机械臂运动学算法原理及其推导过程
标签: 算法

stm32 实现机械臂控制,并实现实时抢微信红包的功能

资源包含完整的设计资料,包含控制板原理图和软件,3D结构图纸,还包含上位机的测试源代码。 该资源是6 轴桌面机械臂。它是一种机械臂,其设计方法是由机器人教育角度、小型自动化以及从研发到生产的扩展的实际需求...
六轴机器手臂运动控制直流伺服反馈系统设计(硬件+源代码+上位机),是基于PID方面的设计,包含教程,原理图,PCB,程序源码等等
在笛卡尔坐标当中,‘Rz,Ry,Rx'通常用来表示围绕z轴,y轴,x轴...APP是用机械臂的正逆运动学来控制的主要分为两种,一种是机械臂角度的控制,另一种是机械臂坐标的控制。打开下载好的APP,点击蓝牙的图标连接mycobot。
很多小伙伴在使用ROS的时候,都会产生类似的疑问,程序写过那么多,仿真也跑过不少,但是如何控制真实机械臂/机器人呢?今天古月君就来尝试破个题。首先,解决这个问题的关键词是“接口”。所谓接口,即数据传输的...



总线舵机控制板STM32F103RCT6,四路总线引出,单电源供电,防反接保护。




4、“学习模式”:学习过程用到手动模式的操作,即通过2个摇杆的四个方向,分别能够控制四个舵机搭配机械臂运行。运动到某个需要记录的位置时,按键K2按下对当前四个自由度的舵机状态进行记录,最多记录20条动作,...
基于FreeRTOS实时操作系统,主控为 STM32F103C8T6 ,机械臂为四轴分别被四个Mg90s舵机控制。本项目实现了 3 种控制方法,分别为 摇杆控制 、 串口蓝牙控制 和 示教器控制。可以进行动作录制和执行。采用8路ADC采集...
选择机械臂末端执行器的时候需要思考使用怎样的末端执行器能够满足场景的需求,做一些简单的搬运,还是想做一些酷炫的动作。物体的表面必须得是光滑的一个平面,凹凸不平的平面无法形成大气压强差的原理。
六轴桌面机械臂系统由上位机、下位机(单片机)、传感器、控制器、电机等多个部分组成,其中传感器用于反馈机械臂的运动和状态,控制器用于控制机械臂的运动和操作,电机用于驱动机械臂的运动。通过对该系统的开发和...

四六轴伺服驱动器 产品手册 及软件用户指南 目录: 1 概述和安全信息 1 2 风险 2 2.1 烧伤的风险 3 2.2 触电的风险 3 2.3 工具移动造成受伤的风险 3 2.4 电磁干扰的风险 4 2.5 由接触不良导致的电气风险 4 3 系统总体...


1. This system has conquered singular problems, except those position robots could not reach according to its physical limitation.2. High efficiency in calculation.3. Be controlled to move to any post...
推荐文章
- c语言课程图书信息管理系统,c语言课程设图书信息管理系统.doc-程序员宅基地
- webpack4脚手架搭建1——打包并编译es6_webpack编译es6语法打包-程序员宅基地
- 信息通信服务、电子商务及物流服务的创新与发展_信息通信,电子商务-程序员宅基地
- websocket.js的封装,包含保活机制,通用_websocket保活-程序员宅基地
- Ubuntu安装conda-程序员宅基地
- LoadRunner性能测试关注指标及结果分析_loadrunner性能指标分析-程序员宅基地
- java怎么做图形界面_java怎么做图形界面?实例分享-程序员宅基地
- eMMC常识性介绍N_emmc温升系数-程序员宅基地
- MATLAB算法实战应用案例精讲-【人工智能】机器视觉(概念篇)(最终篇)-程序员宅基地
- Mac电脑如何串流游戏 Mac上的CrossOver是串流游戏吗 串流游戏是什么意思 串流游戏怎么玩 Mac电脑怎么玩Steam游戏_macos steam和crossover steam区别-程序员宅基地