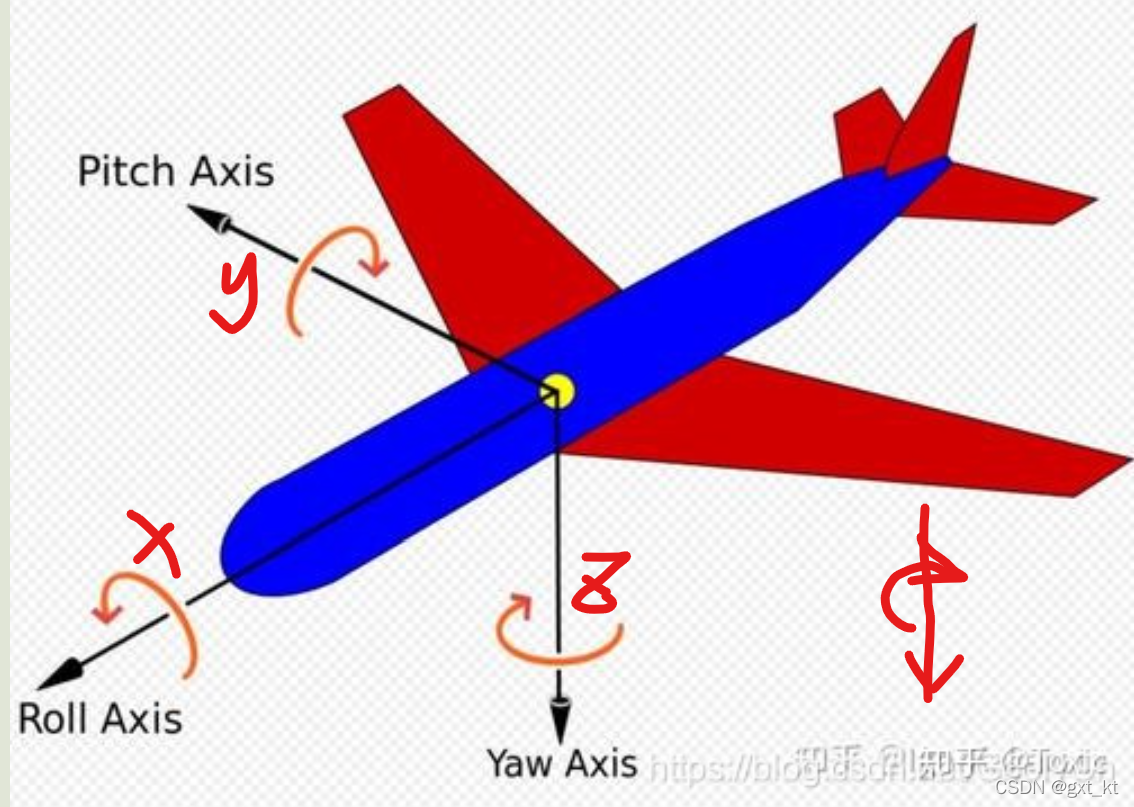
空间中三维坐标变换一般由三种方式实现,第一种是旋转矩阵和旋转向量;...一、首先介绍从相机坐标系转换到世界坐标系,也就是比较通用的body到世界坐标系间的转换。 那么旋转的欧拉角按从世界坐标系转换到相机坐...
”世界坐标系“ 的搜索结果

已知:观察坐标系相对世界坐标系的u,v,w轴与起点q,将世界坐标系中一点变换到观察坐标系 使用左手坐标系推导 u= ( ux , uy , uz , 0 ) v= ( vx , vy , vz , 0 ) w= (wx , wy , wz , 0 ) q= ( qx , qy , qz , 1 ...

Unity中的各种坐标系及相互转化
FANUC机器人建立坐标系的具体方法和步骤(用户+工具)
针对相机模型存在4个坐标系,分别是世界坐标系,相机坐标系,图像坐标系,像素坐标系。成像原理需要明白4个坐标系之间的转换,实现P(世界坐标系位置)三维到P'(成像后的像素坐标系位置)2维之间的转换。相机坐标系...

机器视觉中三大坐标系及其相互关系;世界、相机、图像、像素坐标系之间的关系
前言 二维图像能提供丰富的环境信息或空间信息,这些信息涵盖(1)图像上每一点的亮度与物体某个表面点的反射光的强度的关系(2)图像点在图像平面上的位置与a.相机与空间物体的相对方位的关系 与b....
体像素坐标系和世界坐标系的转换 LUNA数据集是CT扫描的得到的,由于扫描机器位置等各种原因,直接得到的数据,其原点坐标是各不相同的,同时其单位为mm,但是为了比较不同数据之间的关系,需要将坐标统一到世界坐标...
你站在桥上看风景, 看风景人在楼上看你。 明月装饰了你的窗子, 你装饰了别人的梦。



在Tick函数中添加一下代码,就可以看到Actor在世界坐标和局部坐标中的变化。
OpenGL坐标系转换
标签: opengl


机械手坐标系的理解 一直对工具坐标系有点疑惑,今天特意查了下资料,看到一个蛮形象的比喻: "工具坐标系”对应的是“工具坐标点, 就比如你手里拿着2米长的刺刀, 在不考虑工具坐标的情况下,你可以通过X、Y、...
前言 网上关于Unity坐标系讲解的不计其数,但真正讲的透彻明白的寥寥无几。...Unity中经常用到的坐标系有4个,分别为世界坐标系,屏幕坐标系,视口坐标系和GUI坐标系 坐标系综述 1、世界坐标系 表...

世界坐标系1.1 ECEF坐标系1.2 东-北-天坐标系1.2.1 站心直角坐标系1.2.2 站心极坐标系1.3 地理坐标系 1. 世界坐标系 1.1 ECEF坐标系 地心地固坐标系(Earth-Centered,Earth-Fixed,简称ECEF)简称地心坐标系,...
前几篇博客助中介绍坐标系相关的知识,包括车辆坐标系、相机坐标系、图像坐标系、像素坐标系等等,发现在MATLAB自动工具箱中已经有相对比较全面的介绍(未涉及单目相机相关坐标系),这里仅作翻译以串联起前述文章,...
Unity四元数 为了避免万向节死锁的问题,Unity中一般用四元数来表示物体旋转。Unity为物体旋转提供了各种API,例如RotateAround、Rotate、LookAt等方法,本文主要介绍用四元数乘法表示旋转的方法。...
版权声明:本文为博主原创文章,未经博主允许不得转载。 ...     使用相机以前,首先要进行相机标定,其原因是我们通过标定知道...
机械手基坐标系和工具坐标系的相互转换,主要是通过欧拉角来完成的。 double D2R(double D) { return D / 180 * M_PI; } double R2D(double R) { return R / M_PI * 180; } void Rx(cv::Mat& mat, ...
上代码: public Vector3 GetUIToWordPos(GameObject uiObj) { Vector3 ptScreen = RectTransformUtility.WorldToScreenPoint(Camera.main, uiObj.transform.position); ptScreen.z = 0; ptScreen.z = Mathf.Abs...


推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地