
”世界坐标系“ 的搜索结果
主要介绍了Cocos2d-x学习笔记之世界坐标系、本地坐标系、opengl坐标系、屏幕坐标系,本文用代码和注释讲解了Cocos2d-x中的坐标体系,需要的朋友可以参考下
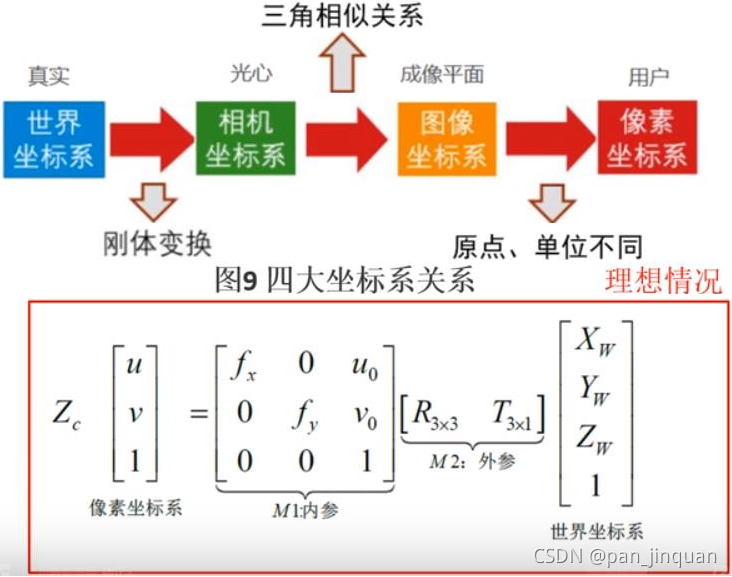
自动驾驶行业,相机投影中四个坐标系:世界坐标系,相机坐标系,图像坐标系和像素坐标系之间的转换关系讲解。

【代码】机器人坐标系转换之从世界坐标系到局部坐标系。
【代码】机器人坐标系转换从局部坐标系转换到世界坐标系。

机器视觉中三大坐标系及其相互关系;世界、相机、图像、像素坐标系之间的关系
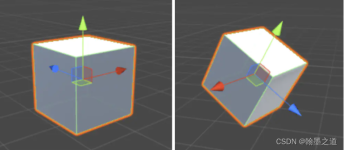
这里的本地坐标和世界坐标是相对于有无父元素来说,坐标都是基于世界坐标系的位置。可以类比本地坐标与世界坐标,物体的运动参考坐标系永远是世界坐标系。1.可以看见本地坐标变了,但本地坐标系位置是没有变化的。2....
坐标体系====首先,threejs中坐标体系是右手坐标系,如下图:在此基础上,坐标体系分为世界坐标和本地坐标,相机默认位于世界坐标体系的(0,0,0)点,本地坐标则是一个组件内部的坐标。
目录一、各坐标系简要介绍二、坐标系转换2.1 世界坐标系转为相机坐标系2.2 相机坐标系转为物理图像坐标系2.3 物理图像坐标系转为图像坐标系2.4 总结2.5 为什么要使用齐次坐标参考文献 一、各坐标系简要介绍 首先...

一、为什么需要世界坐标系? 受限于相机FOV(视场角)以及拍摄时的位置与角度,拍摄的单张图像所含信息有限,当需要把多张图像的信息聚合在一起时,所面临的一个问题就是 不同图像在拍摄时处于各自的 **相机/物理/...
世界坐标系(world coordinate system):用户定义的三维世界的坐标系,为了描述目标物在真实世界里的位置而被引入。单位为长度单位,比如m 相机坐标系(camera coordinate system):在相机上建立的坐标系,为了从相机...
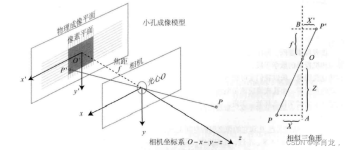
这里的x和y是图像坐标系的坐标,单位是mm,也就是表示(x,y)坐标在像素坐标系下占据(u-Ocenterx)、(v-ocentery)个像素点,则一个像素点占据的mm数可以通过以上公式计算出来。上图中Oc是相机坐标系的原点,o点是图像...
表示地球表面上一个点相对于赤道的北南方向的位置。纬度的度量单位也是度(°),范围从0°到90°,以北纬为正值,...经纬度坐标系统是全球通用的地理坐标系统,广泛应用于导航、地图制作、地理信息系统(GIS)等领域。
像素坐标,世界坐标,相机坐标之间的转换
从公式推导不难看出,在Inverse_K@pixel中得到的是无单位的,这里的Zc乘进去之后才把他变成有单位的值,而在世界变换中,旋转矩阵本身的单位是弧度,因而也是不带有单位的,这样就保证了最后的世界坐标和相机坐标...
面积计算之前需要进行投影坐标系的设置,不同投影坐标系之下计算的面积不同。
1.基础知识1.1矩阵乘法行*列 C=[A1*b11+a2*b21+a3*b31,a1*b12+a2*b22+a3*b32,a1*b13+a2*b23+a3*b33]例: 1*4+2*7+3*1=21,1*5+2*8+3*1=24,1*6+2*9+3*5=39结果为[21,24,39]1.2求逆矩阵 按定义计算逆矩阵。...
坐标体系====首先,threejs中坐标体系是右手坐标系,如下图:在此基础上,坐标体系分为世界坐标和本地坐标,相机默认位于世界坐标体系的(0,0,0)点,本地坐标则是一个组件内部的坐标。
车体坐标系与世界坐标系的互相转换

1. 一些经验之谈: 一般世界坐标系到相机坐标系的变换会发生在模拟器中(典型如pybullet, unity等), 因为模拟器中的世界坐标系原点坐标是(0, 0, 0). 但真机上使用该变换就需要采用相机标定以确定相机外参 2. 相机外参...
将图像从图像坐标系到世界坐标系的转换 将图像从图像坐标系到世界坐标系的转换
推荐文章
- Response使用 application/octet-stream 响应到前端_application/octet-stream;charset=utf-8-程序员宅基地
- 利用MultipartFile实现文件上传_实现了multipartfile file上传文件时要选择一个栏目,传给后端一个栏目id,如何实现-程序员宅基地
- muduo之Singleton_muduo singleton-程序员宅基地
- html5 动态存储 localStorage.name 和localStorage.setItem()的差别_localstorage.setitem('aa')和localstorage.aa一样吗-程序员宅基地
- 02.loadrunner之http接口脚本编写_http脚本-程序员宅基地
- The server time zone value ‘�й���ʱ��‘ is unrecognized or represents more than one time zone.-程序员宅基地
- 如何打造企业短视频账号的人设?_做的比较有人格化的公司短视频账号-程序员宅基地
- 一个会做饭的程序员如何每天给女朋友带不同的便当?-程序员宅基地
- PendingIntent重定向:一种针对安卓系统和流行App的通用提权方法——BlackHat EU 2021议题详解 (下)_getrunningservicecontrolpanel-程序员宅基地
- python 之 面向对象(反射、__str__、__del__)-程序员宅基地