
”【机器人】Car-Like小车移“ 的搜索结果

本文构建car-like robot的数学运动模型。可在“混沌无形”免费下载本文PDF
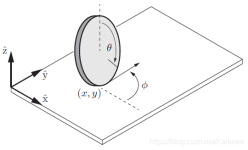
关注同名微信公众号“混沌无形”,阅读更多有趣好文! ...最后,从实际应用角度对比分析了car-like robot和差速驱动机器人的优缺点及其适用范围。 本文第2章将以图 1.3中的机器人构型进行运动.
智能机器人系统(国防科技大学)
标签: 移动机器人
智能机器人系统–第三章机器人运动控制 3.1 轮式机器人构型 3.2 机器人运动规划—N个控制点的B样条曲线 这个讲解非常详细,一直困惑的三个点:多段的曲线如何保证光滑、如何过指定的点、相邻段的控制点有何...

最后,MATLAB有了ROS的支持可以进行机器人硬件在环的仿真测试,又可以通过Coder部署,可以让程序在生产环境运行,让ROS的开发者也能得到MATLAB工业上强大生态链的支持。当然Gazebo仿真中的ROS无人车也是可以的。ROS...
常见移动机器人多角度对比分析
标签: 自动驾驶

本文部分内容参考了深蓝学院的移动机器人运动规划,依此做相关的笔记与整理。KinodynamicKinematicDynamicKinodynamicKinematicDynamic运动学规划问题是综合机器人的运动,同时受到运动学约束(如避开障碍物)和动力...


[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FKurcjk9-1655307296101)...机器人智能化发展从线性过渡到混沌,本号将分享机器人全栈技术(感知、规划


移动机器人——运动模型
标签: robot




二轮自平衡小车相对于其他类型的小车来说是一种极其不稳定的小车。该系统具有多变量、非线性、参数不确定性等特性,是研究各种控制方法的理想平台。二轮自平衡小车就像以前的倒立摆一样,本身无法保持稳定的,为了使...
平衡小车源码 平衡小车之家 Next year marks the 50th anniversary of one of the world’s most famous ‘thought experiments’. It may lack the pop-cultural punch of ‘Schrödinger’s famous cat‘, but it...
1969年,英国物理学家康奈尔·艾萨克·爱默生首次提出了“机器人的本质是宇宙中理性的一种补偿”这一观点。到今日,无人驾驶(self-driving car)已经成为自然界的一部分,并已应用在许多重要的领域中。无人驾驶汽车...
强化学习实战(一)强化学习环境-Gym安装到使用入门
我们主要介绍Car-like和Tank-like两类小车的运动控制。从运动学模型,动力学模型以及误差分析三个角度来构建我们的移动机器人曲线跟踪控制器。内容基础,口味大众。
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地