ROS下使用摄像头进行巡线功能包 。
”turtlebot“ 的搜索结果
基于 TurtleBot:registered: 的机器人的 Robotics System Toolbox:trade_mark: 支持包允许您与来自 MATLAB:registered: 的一个或多个 TurtleBot 进行交互。 您可以获得传感器读数并控制机器人的运动。 相同的 MATLAB...
turtlebot3 waffle pi 的入门教程,适合菜鸟入门使用。
杰森·波特JetsonBot是基于ROS Turtlebot的机器人,使用NVIDIA Jetson TK1和iRobot Create 2基础。 该存储库中的脚本有两种可能的安装方式: 在JetsonBot上的Jetson TK1上安装在单独的Jetson TK1或PC上安装机器人...
turtlebot包
标签: turtle ros
turtlebot包,包含turtlebot1,turtlebot_apps1,turtlebot_simulator1, 将kinect深度图转换成fakelaser建图。
需要注意的是ROS需要IP地址在turtlebot和远程PC之间进行通信 修改.bashrc nano ~/.bashrc PC端配置 export ROS_MASTER_URI=http://PC端IP:11311 export ROS_HOSTNAME=PC端IP Turtlebot端配置 export ROS_MAS
git clone cd turtlebot catkin_make source devel / setup.bash 使用同一节点但使用不同的配置文件可以实现所有目标。 以下是参数的说明:: K1:直线运动的比例增益 I1:线性运动的积分增益 D1:线性运动的微分...
ROS套件-Turtlebot2.pdf
turtlebot.zip
标签: 自动驾驶 巡线
使用turtlebot实现的自动巡线功能 。
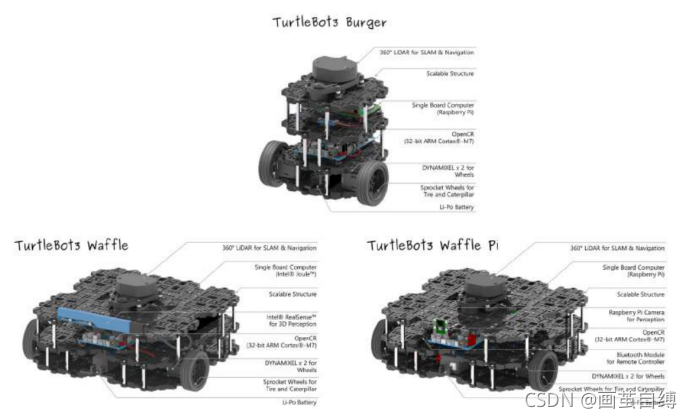
我自己录了个小视频,链接:TurtleBot3-Burger硬件安装记录 萌新之一镜到底&手机剪辑。 这个链接有智能佳提供的装配视频和硬件清单: Turtlebot3入门教程 —— 硬件配置( Hardware Setup )。 官方提供的说明书手册...
里面有很详细的教程,好记忆力不如写下来
gazebo中通过键盘输入控制turtlebot机器人移动和转向python代码
导航Turtlebot2的导航目的: 该程序包使我们的比赛机器人可以根据预先生成的地图导航室内空间。 总体配置基于此设置
turtlebot3_from_scratch:具有EKF SLAM的Turtlebot3和Scratch的逆运动学
基于TurtleBots机器人和ROS机器人操作系统,利用谷歌开源SLAM算法cartographer进行SLAM工作
官方turtlebot3_simulations总是编译错误,这个是我已经修改好的包,修改了-std=c++11和isnan→std::isnan其他部分未改动。
TurtleBot3是一个小型、低成本、可编程的基于ROS的移动机器人,其目的是用于教育、科研、爱好者作品和产品原型。Cartographer是google在2016年开源的SLAM算法,受到许多工程师的喜爱,这两者结合仿真,具有很好的研究...
实操运行机器人实现建图导航等功能
此文件为在linux坏境下安装机器人操作系统及turtlebot机器人源码的教程
Ubuntu 16.04 Turtlebot2 安装(1).txt
买来的turtlebot没说明书,国内代理商简介也写的很简单,网上找了找turtlebot的相关硬件参数,分享一下
我的毕设:用YOLOv3识别turtlebot机器人 具体介绍见: 环境: win10+python3.6 PyTorch 1.1.0 opencv tqdm matplotlib 打标签、数据准备、权重文件下载等详细过程见 主要参考ultralytics程序: ,略加注释 结果:
在RBX1下面TurtleBot建图避障模拟指令备忘录,主要是一些指令集合。
turtlebot3 waffle pi 基础教程,包括对机器人的简单介绍,机器人硬件的组装,软件的安装以及一些功能实现的教程。


【资源说明】 1、该资源包括项目的全部源码,下载可以直接使用! 2、本项目适合作为计算机、数学、电子信息等专业的课程设计、期末大作业和毕设...基于turtlebot3+pytorch的深度强化学习DQN,DDPG,PPO,SAC算法源码.zip
Turtlebot3京天用户手册 v2.2-2020.11.20--新版.pdf
推荐文章
- lenovo 邵阳E42-80 Ubuntu14.04.5 wireless 驱动安装_昭阳e42-80网卡驱动-程序员宅基地
- C和C++安全编码笔记:总结_c与c++安全编码 试题-程序员宅基地
- C# 读取Word 表格数据(单元格纵合并)_vc++ ole 判断word表格单元格是否合并-程序员宅基地
- java面向对象--内部类-程序员宅基地
- 深入浅出 FlatBuffers 之 Schema-程序员宅基地
- IT发展方向_it以后的几个方向-程序员宅基地
- 计算机考研408每日一题 day78_命中率高且电路实现简单的cache内存映射方式-程序员宅基地
- Unhandled exceptions: java.lang.IllegalAccessException, java.lang.reflect.InvocationTargetException_unhandled exceptions: java.lang.instantiationexcep-程序员宅基地
- webview ERROR_UNSUPPORTED_SCHEME ,errorcode=-10问题处理-程序员宅基地
- embed标签-程序员宅基地