实操运行机器人实现建图导航等功能
Turtlebot Teilaufgabe 1 – Mit Turtlebot3 vertraut machen 原始消息定义
Turtlebot: 开源机器人开发平台 Turtlebot 是一个开源的机器人开发平台,用于帮助研究人员、开发者和爱好者构建自己的机器人系统。它基于 ROS(Robot Operating System)框架,支持多种传感器和硬件平台,并提供了...
使用turtlebot4的记录
turtlebot教程合集 创客制造: Turtlebot仿真. Turtlebot入门. ros.
Turtlebot2-On-Melodic 使您的在ROS Melodic(Ubuntu 18.04)上运行。 这个项目引用了。 多亏了和的工作。 先决条件 Ubuntu 18上的ROS Melodic Turtlebot2 建立Turtlebot2工作区 首先, cd到您的catkin工作区。 ...
turtlebot3强化学习避障,包括DQN, DDPG,PPO,SAC。 转载地址 https://github.com/Crawford-fang/ROS_pytorch_RL/tree/main/DQN 我就用过DQN,里面有很多需要修改的地方。主要是包括路径的代码,改成自己的路径。...
turtlebot3_simulations:TurtleBot3的模拟
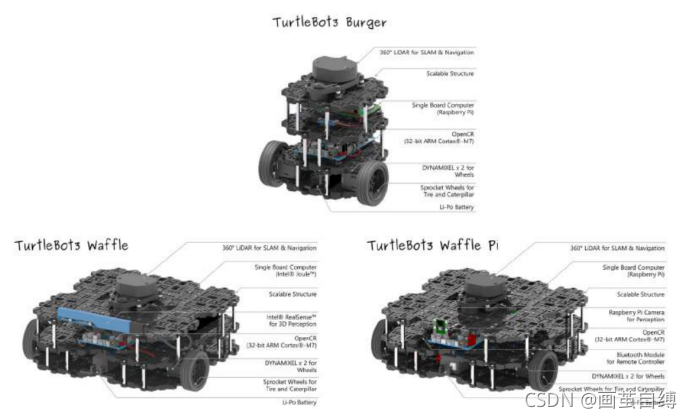
Turtlebot3硬件都是开源的,您可以在其Wiki上找到汉堡和华夫饼干底板的STL文件。 您可以3D打印多余的底板,并根据需要修改Turtlebot3。 以下是TB3 Burger的3级Mod的示例。 它带有8个基板,而我3D打印了另一个基板,...
需要注意的是ROS需要IP地址在turtlebot和远程PC之间进行通信 修改.bashrc nano ~/.bashrc PC端配置 export ROS_MASTER_URI=http://PC端IP:11311 export ROS_HOSTNAME=PC端IP Turtlebot端配置 export ROS_MAS
TurtleBot手臂为动力学更新! 机器人手臂代码的动力学版本。 我没有尝试过Jade,但是只要稍作改动,它就可以轻松工作。 它几乎与Indigo上的代码相同,但对turtlebot_arm_block_manipulation进行了一些改进(请参阅...
sudo apt install ros-${ROS_DISTRO}-turtlebot3 ros-${ROS_DISTRO}-navigation ros-${ROS_DISTRO}-dwa-local-planner ros-${ROS_DISTRO}-slam-karto 使用方法 自主探索 该程序在Ubuntu 16.04+kinetic上测试通过, ...
Turtlebot_Mapping 在乌龟的状态机中,有两种方法可以手动或自动操作机器人。 如果选择了手动方式,则可以通过键盘进行控制,但是使用自动方式时,有两个任务,第一个任务是从预设地图中移动三个点,第二个任务是...
TurtleBot3 TurtleBot3的ROS 1软件包 开发 主 Kinetic + Ubuntu Xenial Melodic + Ubuntu仿生 Noetic + Ubuntu焦点 TurtleBot3的ROS 2软件包 ros2-devel ros2 短跑+ Ubuntu Bionic Foxy + Ubuntu焦点 适用于...
TurtleBot3练习:移动TurtleBot3基本电动机操作实践。练习套餐! 这是用于在TurtleBot3上练习电机消息用法的教程包。 TurtleBot3위한위한익히ROS튜토리얼지입니다。 由KAsimov ROS开发项目构建: ://kasimov.korea....
Toolbox控制和导航TurtleBot3地面机器人 该存储库包含MATLAB和C ++代码,以及在具有静态和动态障碍物的环境中模拟机器人运动所需的Gazebo文件。 TurtleBot3 该项目中使用的地面机器人是。 机器人的一些模型如下所示...
局部RRT路径规划matlab代码在turtlebot3上实施RRT * RRT *是在Matlab中实现的,并具有ROS + turtlebot仿真 Project 5是使用C ++在ROS和Gazebo中完成的 使用了Turtlebot 3。 首先使用SLAM将世界转换为2D地图。 跟踪...
通过ros订阅游戏手柄的消息/joy,然后转换成turtlebot能够接收的速度消息的格式/cmd_vel
Turtlebot3_shm 对于多个Turtlebot3 Navigation + ORCA算法进行本地路径要求Ubuntu 16.04 ROS Kinetic Kame 预先安装的catkin_Ws note: please install the following item before proceding 关于这个项目该库专用于...
Turtlebot3_Gripper 带抓手的Turtlebot 3。 配置 cd ~/catkin_ws/src,, git clone , cd .. , catkin build , source ~/catkin_ws/devel/setup.bash , echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc , ...
turtlebot3功能包,下载编译即可用
TurtleBot3TurtleBot3 AutoRace的ROS软件包版Kinetic + Ubuntu Xenial Melodic + Ubuntu仿生适用于TurtleBot3的ROBOTIS电子手册Wiki的turtlebot3_autorace软件包 (元包) 与TurtleBot3相关的开源与TurtleBot3相关的...
TurtleBot3TurtleBot3应用程序的ROS软件包版Kinetic + Ubuntu Xenial Melodic + Ubuntu仿生适用于TurtleBot3的ROBOTIS电子手册Wiki的turtlebot3_applications软件包 (元包) 与TurtleBot3相关的开源与TurtleBot3...
TurtleBots的制图师ROS 目的 是一个系统,可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和制图( )。 该存储库通过为提供了制图员SLAM。...您可以在“ 找到有关为制图师ROS的TurtleBot支持 提供帮助的信息。
因此,仅使用“华夫饼”怎么跑1号航站楼:- export TURTLEBOT3_MODEL= " waffle "roslaunch turtlebot3_gazebo turtlebot3_world.launch2号航站楼:- export TURTLEBOT3_MODEL= " waffle "roslaunch turtlebot3_...
TURTLEBOT3的差异控制 (自动移动机器人) 对具有差动驱动的机器人进行运动学控制。 运行脚本时,可以在手动和自动模式之间切换。 在手动模式下,您可以设置机器人的线速度和角速度。 在自动模式下,您可以设置...
标签: 源码软件
turtlebot3导航包
标签: CMake
TurtleBot3TurtleBot3消息的ROS 1程序包发展掌握Kinetic + Ubuntu Xenial Melodic + Ubuntu仿生TurtleBot3消息的ROS 2软件包ros2-devel ros2 短跑+ Ubuntu Bionic适用于TurtleBot3的ROBOTIS电子手册Wiki的turtlebot3...
turtlebot3_msgs:TurtleBot3的ROS消息包