
”ros系统“ 的搜索结果

1)由于ROS系统下的各个launch文件的的执行都得在terminal终端执行,而且ROS系统对于非开发者的使用难度很大,故而导致ROS系统在产品化的过程中使用受阻; 2)由于在机器人系统开发的过程中,常常需要启动多个launch...
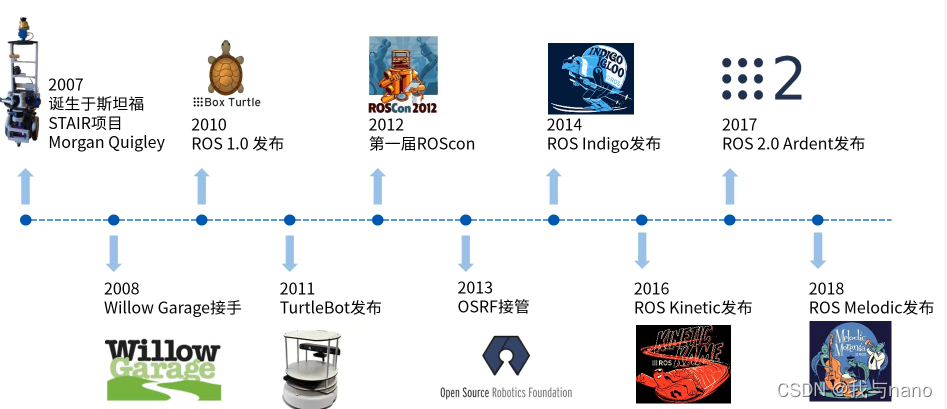
1.ROS发展史 本世纪开始,关于人工智能的研究进入了大发展阶段,包括全方位的具体的AI,例如斯坦福大学人工智能实验室STAIR(Stanford Artificial Intelligence Robot)项目,该项目组创建了灵活的、动态的软件系统的...
2010年Willow Garage公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS的热潮。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具...
树莓派3代基于debain jessie 系统的ROS镜像与基于ubuntu mate系统的ROS系统,系统都是本博自己手工编译打包镜像,方便大家学习

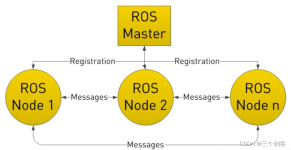
ROS常用的概念(一) 下面的概念可能并不是完全准确,但是力求精简便于理解. 他们的具体内容会在程序中更详细讲解 1: message: 即消息.机器人需要传感器,传感器采集到的信息,即这儿的message. 假如我们的GPS采集...

ROS系统基础知识梳理(四) 串口通信

现在做无人车和其他种类机器人的公司或者研究机构,很多用的ROS系统。原因在于其信息传递快捷方便,且要求开发者以模块化的方式设计程序,使得工程容易管理和重构,优势明显。 最近因为所在单位需要,也开始研究ROS...
文章目录引言ROS系列文章ROS 工作空间创建工作空间编译工作空间导出环境变量创建功能包添加源代码修改构建规则编译功能包验证参考 引言 其实从前几篇文章中我也有提及过ROS 工作空间,而且代码也是在工作空间中编译...

使用树莓派在安装了ROS后,按照ROS的架构可以开发一个简单的四轮驱动Wifi小车:如图。 配件说明 双向电机马达 X4树莓派B+ X1双路转向控制芯片 X1万向轮 X4五号电池盒 充电宝 各一个面包板一个底盘支架1套 重点...


我们将使用 Ubuntu Core,并在 Raspberry Pi 上安装 ... 我希望,通过向您介绍专业人士用于他们的机器人的操作系统(以及诸如 ROS 之类的工具),为您在该领域继续前进并取得伟大成就铺平了道路! Ubuntu Core 与 Raspb
本文档是B站视频配套笔记,视频地址:https://space.bilibili.com/411541289/channel/collectiondetail?sid=693700 笔记配套的 ROS 源码仓库地址:https://github.com/yym68686/ROS-Lab


一、Ubuntu下的串口助手cutecom 下载:sudo apt-get install cutecom 打开:sudo cutecom 查看电脑链接的串口信息(名称): dmesg | grep ttyS* ...二、使用ROS提供的serial包实现串口通信 ...
前面的几篇文章我们简单介绍了ROS...但如果ROS只是整体系统的一部分,则需要利用内存共享或者网络传输等方式与其他程序进行数据交互,这时候LCM就是一种比较简单的选择(如果不清楚什么是LCM,可以参考这篇文章)。 ...


然后,新建终端,执行:rosrun rqt_reconfigure rqt_reconfigure命令,启动ROS系统自带的Dynamic Reconfigure软件,在该软件里面修改对应相机的参数。 方法2:(通过命令行修改) 通过roslaunch先发布realsense...
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地