ROS操作系统入门必备资料,适合初学者。讲的很清晰,本人还会同时更新博客
”ros系统“ 的搜索结果
最近给树莓派安装了ros系统,这里记录一下。 步骤: 1.下载ros系统的软件 这里推荐从ubiquityrobotics下载ubiquityrobotics 的系统。这个相当于是给你下载了ubuntu16.04和ros系统一起,只要烧录到树莓派的sd卡里面就...
基于ROS系统的无人机全地形视觉定位着陆系统完整源码+全部PDF文档资料.zip大创项目,文件夹介绍如下: Application_Form_and_Title_Form (项目的申请书中期答辩和结题书) patent (专利相关内容) picture (相机...
ROS2直接按照Tier 3标准安装遇到一些困难,作为初学者,这种环境配置一定是最困难的。后续,我们慢慢的来充实我们的上天计划,增加我们的“筹码”,最终让我们的计划成功!

重装22.04系统,这次直接有网络和wifi,然后修改网络的静态ip地址等,下载好livox-viewer,成功连上激光雷达。但后面安装livox-sdk,可能因为系统太新(livox-sdk推荐18.04版本系统),出现大量...完成ros系统安装。
介绍了一种无人小车自动跟随方案,该小车以树莓派3B为控制板,搭载ROS操作系统,在ROS系统环境下编写Python脚本文件,通过话题的订阅和发布进行对距离信息的数据处理和运动参数的控制实现,采用激光雷达进行距离测量...
龙源期刊网http://www.qikan.com.cn基于ROS系统自主路径规划与避障小车的研究作者:李阳卢健何耀帧来源:《科技风》2018年第04期摘要:自主导航与避障是目前移动小车的发展趋势,本文采用的Fast-SLAM算法,导航和...
卸载ros包 : sudo apt-get purge ros-* 卸载依赖包: sudo apt-get autoremove
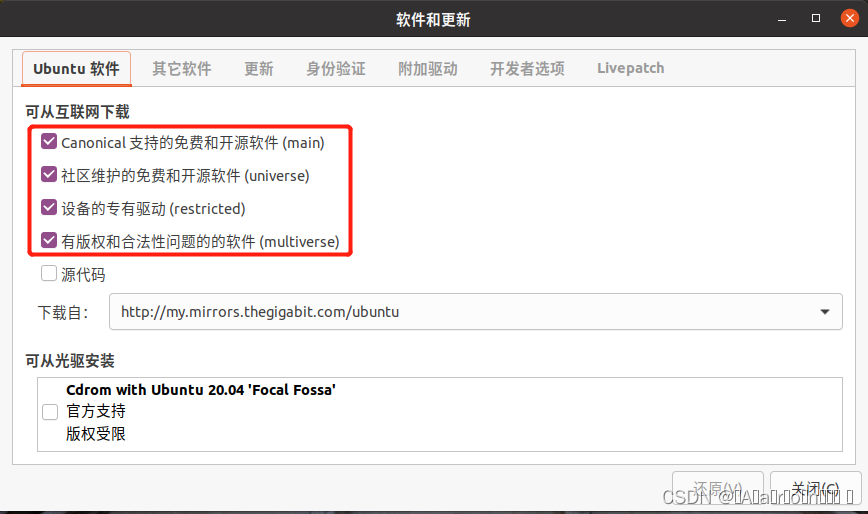
1.配置Ubuntu软件仓库打开软件和更新配置你的Ubuntu软件仓库()以允许使用和 “” 存储库。2. 设置sources.list3.设置密钥4.安装在这开始之前我们先更新软件包4.1更新软件包运行之后看到这样就可以了。
在ros的仿真里采集点位信息,最简便的方式之一

但如果ROS只是整体系统的一部分,则需要利用内存共享或者网络传输等方式与其他程序进行数据交互,这时候LCM就是一种比较简单的选择,例如自动驾驶中车内利用ROS进行数据流处理控制,车间利用LCM通信。 1. LCM的介绍...
介绍了一种无人小车自动跟随方案,该小车以树莓派3B为控制板,搭载ROS操作系统,在ROS系统环境下编写Python脚本文件,通过话题的订阅和发布进行对距离信息的数据处理和运动参数的控制实现,采用激光雷达进行距离测量...
ROS系统下将指定Topic内容保存到txt文件——rostopic echo

基于ROS系统的机械臂仿真(源码+项目说明)(模拟运动控制卡的实现方式进行NURBS等插补算法仿真).zip 基于ROS系统的机械臂仿真(源码+项目说明)(模拟运动控制卡的实现方式进行NURBS等插补算法仿真).zip 基于ROS...
机器人学原理与ROS系统开发
标签: 开发技术
# 1. 机器人学基础概念 ### 1.1 机器人学概述 在本节中,我们将介绍机器人学的基本概念,包括机器人定义、发展历史以及在现代社会中的应用。 ### 1.2 机器人的结构与分类 我们将深入探讨机器人的结构组成和各种...

ROS系统介绍 此博文已经很好的介绍了ROS系统,在这里我就不重复介绍了【传送门】 ROS开源社区 ROS开源社区可以很好的帮助初学者快速入门,初学阶段遇到的大部分问题都可以在上面找得到。 古月居...

命名虚拟机(可选择默认,也可自行修改),选择安装位置(可选择默认,也可自行修改,建议不要安装在C盘),点击下一步。若选择旧版本,点击之后进入下一界面,往下滑找到 past release,双击past release。...
一、配置ROS系统(以Ubuntu18.04 ROS Melodic版本为例)(以Ubuntu18.04 ROS Melodic版本为例) 1、配置 ROS 镜像源 2、下载安装 ROS 二、在 ROS 上运行 SDK 配置 1、在 ubuntu 系统上安装 SDK(MVS) 安装包; 2、...
调用ros系统摄像头可视化rqt工具
标签: 学习

ROS仿真、专为自动驾驶研发提供的系统平台

文章目录一.ROS文件系统二.创建ROS程序包\编译ROS程序包三.ROS节点四.ROS话题五.ROS服务和参数六.使用rqt_console和runlaunch七.使用rosed编辑ROS中的文件八.ROS消息(msg)和ROS服务(srv)九.消息发布器和订阅器 一....

推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地