ros是一种分布式机器人操作系统,依赖于linux(一般支持的linux系统有ubuntu系列与debian系列),由斯坦福发布,目前,很多机器人的研究都是基于它。其基本框架如下: 上图是一个在机器人上跑起来的ros的整体...
”ros系统“ 的搜索结果
ROS 是 Robot Operating System 的缩写,通常称为“机器人操作系统”。但它并不是一个真正的操作系统,而是一个面向机器人的开源的元操作系统(meta-operating system),提供类似传统操作系统的诸多功能:硬件抽象...
ROS 系统图片获取工具
标签: ROS图片获取
在 ROS 系统中订阅 sensor_msgs/Image 格式图片topic,利用 OpenCV 完成显示,按键s(S)完成图片保存。

ROS全称Robot Operating System(机器人操作系统)ROS是适用于机器人的开源元操作系统ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制还提供了用于在多台计算机上获取,构建,编写和运行...

ROS系统简介图,包括什么文件,系统级别的文件,软件包文件等
ROS (Robot Operating System, 机器人操作系统) ,包括了四个part:通信机制、开发工具、应用功能、生态系统,是一个适用于机器人的、开源的元操作系统。目标:提高机器人研发中的软件复用率。本文仅仅简单介绍了ROS...
Robot Operating System(ROS)是一个开源的操作系统,专门为机器人和自动化系统的开发而设计。它提供了一系列的工具和库,使得开发者可以轻松地构建和部署机器人应用程序。ROS的设计理念是基于分布式系统,允许多个...
ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS,为所有节点的通信提供可靠...
ROS系统制作工具

ROSBridge可以实现ROS系统与非ROS外部系统的通信,文档比较多比较杂,在Windows客户端的实现大多是Java, Python, JS等,这里对C++客户端使用Websockets通信进行了测试,C++ ROSBridge的客户端有轻量级,解耦合的优点...
机器人操作系统ros系统使用ethercat总线通信源代码,可以参考使用
(Robot Operating System)的实现原理
智能机器人操作系统IROS,对标ROS,采用自研方式,2022.1.8 发布完全自主可控的智能机器人操作系统IROS V1.0.0,提供了分布式开发框架,消息、服务、参数、Action等主要通信性能指标较开源ROS提高百倍以上,综合采用...
[ROS基础-3] ROS系统安装与基本配置 [ROS基础-4] ROS系统框架 文章目录系列文章目录前言一、ROS系统整体框架二、ROS文件系统级2.读入数据总结 前言 ROS本身不是一种单纯的编程语言,而是用于编写机器人软件程序的...
项目中使用到ROS系统做SLAM和导航,本人第一次接触Linux系统和ROS系统,看过一些书籍文章之后觉得二者很有意思,便记录下来供后期复习。
上一篇文章我们讲了ros的安装,并且运行了ros自带的一个简单程序。 下面,我们将从一个空的文件夹开始,一步步创建工作空间,包,和节点,并让该节点输出“Hello ros”。 本文主要参考这篇文章,部分内容基本照抄...
虚拟机ros系统安装
标签: linux

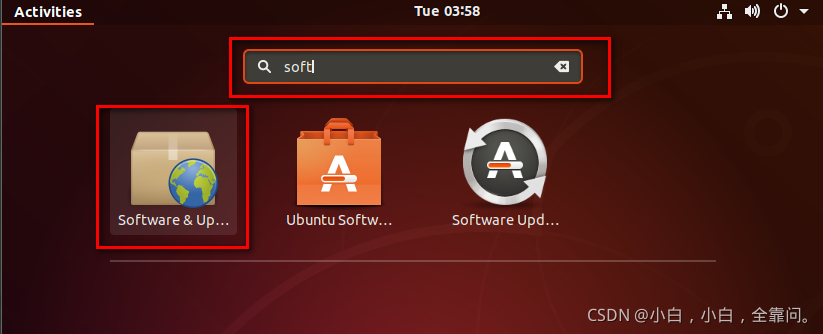
因为最近学习的缘故,花了半天的时间安装了ROS,期间因为ubuntu也是临时安装的双系统,遇到了各种各样的问题,这里记录一下,主要集中在ROS系统安装问题的解决。
Windows上安装ROS系统 请参照以下链接和说明,完成Windows上安装ROS系统。 Installation/Windows - ROS Wiki 注意事项: Windows版本:64-bit Windows 10 Desktop 或者 Windows 10 IoT Enterprise 需安装ROS版本:...
ros移植cpp代码



rosdep update命令使用 1.首先将下面仓库的内容clone到本地 git clone https://github.com/ros/rosdistro.git 记录rosdistro存放地址,例如/home/gec/rosdistro ...cd /usr/lib/python2/dist-packages/ros
本文基于ROS操作系统介绍了一种运动与跟随系统的设计及实现,该跟随系统包括以激光雷达进行全方位角度的距离测量,使用Python语言编写脚本,...基于ROS系统使开发简单快速,适用范围广,具有良好的可移植性和通用性。
推荐文章
- SMT的基本知识介绍_smt行业基础知识-程序员宅基地
- 43.基于SSM的口腔护理网站|基于SSM框架+ Mysql+Java设计与实现(可运行源码+数据库+lw)-程序员宅基地
- HTML中Table表格的使用与漂亮的表格模板_html table 样式-程序员宅基地
- Linkage Mapper中的局部和全局地图比较实践指南(含实例分析)-程序员宅基地
- 线性筛求欧拉函数-程序员宅基地
- 初中几何题_初中几何题解-程序员宅基地
- jQuery 放大镜效果_jquery放大效果-程序员宅基地
- Python构建快速高效的中文文字识别OCR_中文ocr python-程序员宅基地
- SQL语句用case when实现if-else条件逻辑_case when里面可以加if else吗-程序员宅基地
- 数据结构实验课程设计报告求工程的最短完成时间_(1)用字符文件提供数据建立aoe网络邻接表存储结构; (2)编写程序,实现图中顶点的-程序员宅基地