lego loam代码注释即自己理解,有图和论文说明一些难以理解的地方,方便学习
”loam“ 的搜索结果

LeGO-LOAM算法详解
标签: 算法


一、主函数 功能:申明订阅、发布内容 二、imuHandler() 功能: 接收imu消息; 减去重力影响,求出xyz方向的加速度实际值; 进行坐标轴变换(从RPY — XYZ 变换到 RPY — ZXY) 下面解释如果消除重力加速度的影响...

aloam 代码阅读与总结
标签: 自动驾驶
aloam 代码阅读 确实简洁 但是感觉好糙

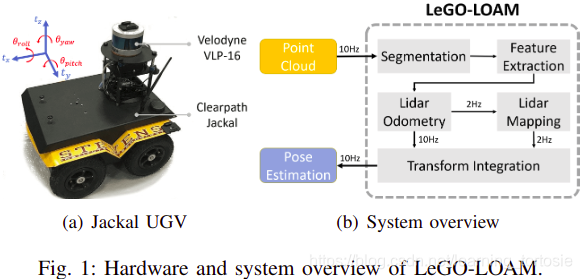
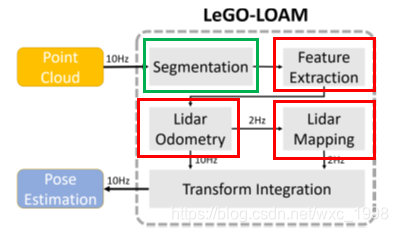
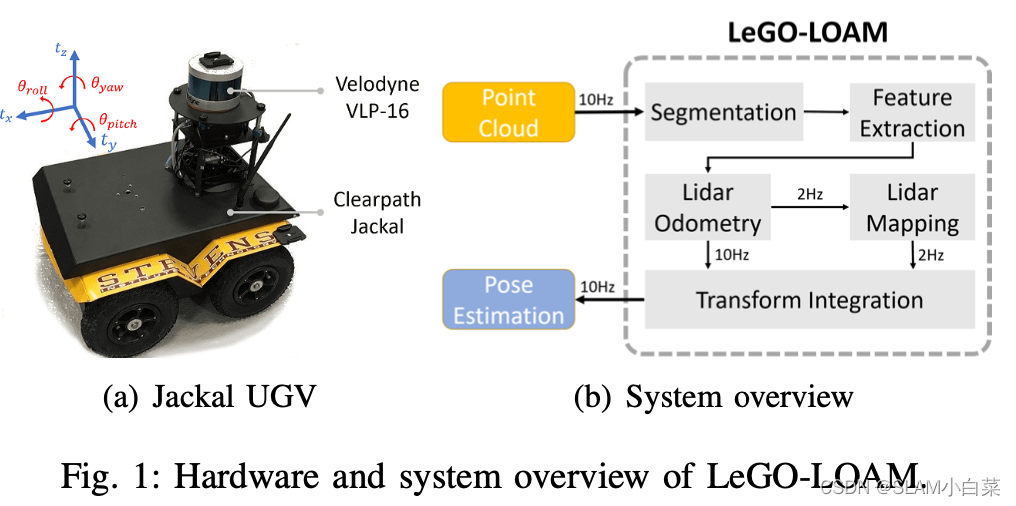
LeGO-LOAM
该算法把SLAM问题分为两个算法同时运行,实现实时建图,一个odometry算法,10Hz;另一个mapping算法,1Hz。
最近在学习slam建图,想尝试使用大疆mid40利用loam_livox来进行建图,整个过程中遇到了特别多的坑,重装了五六次系统,所幸尝试之前将系统镜像了。 这个算法不需要里程计,利用激光雷达发布的实时点云信息或者录制的...
aloam将主要分为高频率 低精度的激光里程计估计算法,和 低频率高精度的 借助激光里程计作为初始估计的 将当前帧到地图的优化算法。本质就是构建点到线,点到面的残差来估计机器人的位姿状态。......
首先LEGO-LOAM是在LOAM基础上基于地面优化,并且加入了简易的闭环检测,而LOAM是实时三维激光SLAM的开山鼻祖,使得实时三维重建成为可能,同时基于特征的激光SLAM基本上都是LOAM的衍生算法,思想大同小异。LEGO-LOAM...


作者丨马赫WGH@知乎来源丨https://zhuanlan.zhihu.com/p/452544259编辑丨3D视觉工坊IROS是机器人领域的盛会,本文由南洋理工大学的在读博士王晗等人发...


LOAM SLAM LOAM细节分析 比较详细的分析代码流程 https://zhuanlan.zhihu.com/p/57351961 除了LOAM还有易读版本的A-LOAM http://tb.huitaofuwu.com/2020/03/14/%E8%AE%BA%E6%96%87%E5%9B%9E%E9%A1%BE%E4%B9%8BLOAM/ ...

这个函数是个回调函数,在订阅到点云数据的时候才会运行,ALOAM中的点云接收频率为先判断初始化,等待几帧来到后才认定为初始化成功进行线束id计算与每个点的时间戳,并将点云存到其对应的个数组中标记每个线束的最...
由于对三维激光SLAM比较感兴趣,并且最近也在找无人驾驶激光SLAM算法的岗位,所以花了一个多月把LOAM的论文和源码好好看了一遍。发现论文还是比较容易明白,但一看代码全是坑。看论文懂了,看代码似懂非懂。为了...
A_loam源码解析一
标签: 自动驾驶

Jetson Xavier NX是一款由NVIDIA推出的嵌入式人工智能计算平台,旨在提供高性能、低功耗的计算能力,特别适用于边缘设备和嵌入式系统。它采用NVIDIA的Volta架构,搭载六核ARM Cortex-A57 CPU和384个CUDA核心的GPU,...
featureAssociation.cpp解析三七、优化初始化八、特征关联1. 更新初始位姿updateInitialGuess2....loam源码地址:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM. 论文学习:【论文阅读】LeGO-LO
LOAM中Ceres的使用分析,包括aloam和floam
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地