
”loam“ 的搜索结果
LOAM论文笔记,源码阅读笔记
LeGO-LOAM批注版
本文指在对ALOAM的流程进行梳理,并对其中的一些问题进行整理
鉴于工作和学习需要,学习了激光salm算法loam,并阅读了作者的原版论文,现将学习过程中的理解与一些源码剖析记录整理下来,也是对于学习slam的阶段性总结!!!
本文主要介绍了loam和其衍生算法
ALOAM代码详细注释版
标签: ALOAM
ALOAM详细注释版

可以在A-LOAM/analysis/ntuviral_aloam文件夹中找到A-LOAM/analysis/ntuviral_aloam 。 只需运行MATLAB脚本checkall_parallel.m ,结果将被打印出来。 如果您在工作中使用NTU VIRAL数据集,请使用数据集处的BibTex...
用于kitti数据集的LeGO-LOAM 该存储库包含LeGO-LOAM的修改后的代码,可通过kitti数据集运行和评估。 运行代码时,您将以KITTI地面格式获取LeGO-LOAM的轨迹结果,并且可以通过EVO-eval套件使用KITTI地面真实结果直接...
loam_velodyne_kitti_ros 该软件包是LOAM算法的ROS Indigo版本的修改副本,可与KITTI数据集一起使用: 在以下方面进行了主要更改: scanRegistration.cpp重命名为scanRegistrationKittiROS.cpp 通过读取.bin文件并将...
用Lego-loam跑kitti数据集修改代码
A-LOAM算法完全注释
标签: 算法
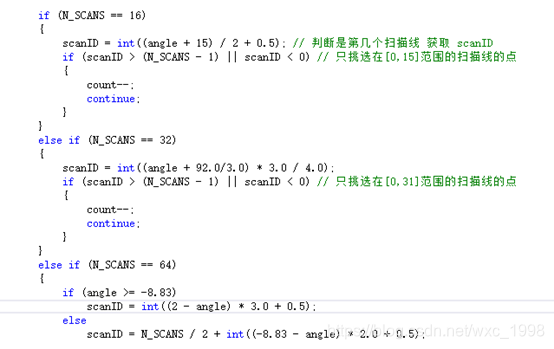
A-LOAM算法是LOAM算法的开源版本,非常适合新手入门激光SLAM。本人(985控制硕士)花了一个月时间仔细研读了A-LOAM算法的3大核心模块:点云预处理(scanRegistration.cpp)、雷达里程计(laserOdometry.cpp)以及建图...
这篇文章提出了一个名为LeGO-LOAM的轻量级6自由度的激光SLAM方法. LeGO-LOAM主要分为点云分隔, 特征提取, 里程计和建图四个方面, 在特征提取方面它借鉴了LOAM算法, 并且和其他的激光SLAM方法相比, LeGO-LOAM的亮点是...
Velodyne VLP-16激光雷达三维地图构建源码。

SLAM学习笔记,欢迎大家交流有关问题。。。。。。。。。。。。。。。。。。。。
将秦通的aloam稍作修改,使对于输入的每一帧激光数据,都输出一个建图后的pose(非实时),原版本的aloam在建图过程为保证实时性,会丢掉一部分数据。 修改的部分: 1 发布与订阅缓冲区的大小 2 建图频率 3 取消为保证...
LOAM是KITTI测试中排名第一的状态估计和激光建图方法,知名度很高,在它的基础上衍生出了很多改进版本,例如ALOAM、LEGO-LOAM、Inertial-LOAM等。 本文通过对论文和代码的细节进行分析,试图弄明白这个方法的...
M-LOAM 具有在线外部校准功能的多LiDAR系统的稳健里程表和制图 M-LOAM是用于多LiDAR外在校准,实时测距和制图的强大系统。 在没有人工干预的情况下,我们的系统可以从几个外部未校准的LiDAR开始,自动校准它们的外部...
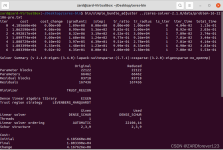
KITTI-LOAM评估结果
标签: 自用
KITTI-LOAM评估结果
velodyne 运行loam_velodyne资源包
loam_velodyne使用速腾聚创16线激光雷达建图和计算激光雷达里程计-附件资源
matlab精度检验代码LeGO-LOAM的评估:轻量级和地面优化的激光雷达里程表和制图 这是Team 11针对NAVARCH / EECS 568,ROB 530:Mobile Robotics的最终项目git存储库。 我们项目的标题是“乐高-LOAM的评估:轻量级和...
LOAM纯英文论文原件
标签: slam 论文
LOAM论文原稿
SC-Lego-LOAM:LiDAR SLAM:扫描上下文+ LeGO-LOAM
lego-loam bag文件
标签: bag
lego-loam bag文件
KITTI数据、LOAM系列代码
标签: 文档资料
KITTI数据以及LOAM系列代码(轨迹评估改),需配合我的相关博客应用
推荐文章
- 【vue-treeselect+vxe-table】数据量大的时候懒加载,数据回显,输入框绑值,末级节点不要前面的箭头等问题详解_treeselect显示加载中-程序员宅基地
- 【从0入门JVM】-01Java代码怎么运行的_代码如何在jvm中运行-程序员宅基地
- TreeViewer应用实例(ITreeContentProvider与LabelProvider的使用)-程序员宅基地
- 如何将别人Google云端硬盘中的数据进行保存_谷歌网盘怎么保存别人的资源-程序员宅基地
- java中查看数据类型_java查看数据类型-程序员宅基地
- Scrapy-redis分布式+Scrapy-redis实战-程序员宅基地
- web播放H.264/H.265,海康,大华监控摄像头RTSP流方案_海康api hls怎么取265的流-程序员宅基地
- HTML详解连载(7)-程序员宅基地
- PHP使用多线程-程序员宅基地
- 由excel一键生成json的小工具(基于python,仅支持单层嵌套)_excel转json github-程序员宅基地