”Rosbag“ 的搜索结果
robag的使用方法,仅记录高频命令,30秒学会!
rosbag rosbag是一个与node.js和浏览器兼容的模块,用于读取二进制数据文件。 安装 npm install rosbag 或者 yarn add rosbag 然后,根据您的环境,您可以import {open} from 'rosbag'或require('rosbag') import...
ROS中机器人模型包含大量的部件,每一个部件统称之为link(比如手部、头部、某个关节、某个连杆),每一个link上面对应着一个frame(坐标系), 用frame表示该部件的坐标系,frame和link是绑定在一起的。TF坐标变换...
这里介绍两种rosbag包的绘图工具,一种是ros自带的GUI可视化工具rqt_plot,另外一种是开源工具PlotJuggler。
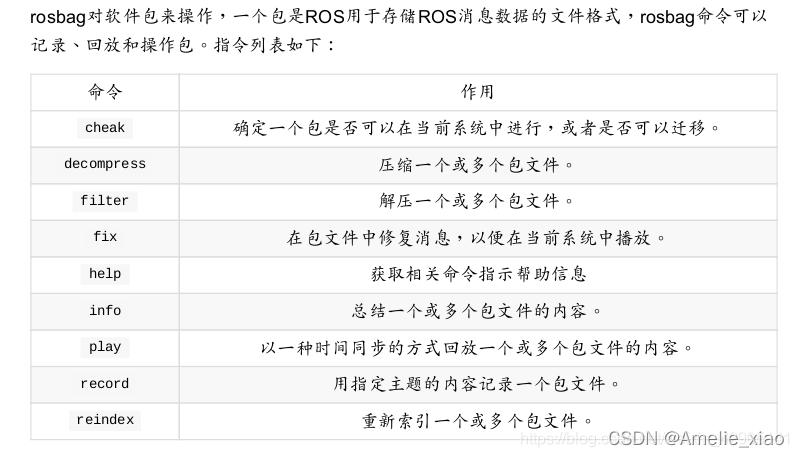
rosbag 的常用命令
标签: ros
【代码】rosbag 的常用命令。
python merge_bag.py -v 1028msf.bag msf.bag vinReNoOutlier.bag 就把msf.bag和vinReNoOutlier.bag完全合并在一起了,时间戳打的都是原来两个bag里原始的时间戳,而不是像一边rosbag play一边rosbag record一样录...

文章主要介绍rosbag的常用命令,rosbag是一个基于ros系统的话题数据录制和回放工具,在实际应用中,可以使用 bag 文件来保存和恢复系统的运行状态,常用于初始数据采集及DEBUG。

rosbag_editor:使用简单的GUI从给定的rosbag创建一个rosbag
rosbag_timeline什么是新的rqt_bag具有相同的功能,但是它显示的时间戳是消息到达rosbag record ,而不是消息生成的时间。 该工具显示消息时间戳,并带有一些辅助功能,例如主题排序,着色等。它是如何工作的stamp_...
rosbag_controller 一个 ros 节点,用于包装 rosbag 并提供务实地暂停和取消暂停包的服务。
导入rosbag数据-纯python-独立-无需安装ROS。 importRosbag函数导入一个.rosbag文件。 使用'filePathOrName'参数提供路径。 例如 from importRosbag.importRosbag import importRosbag topics = importRosbag...
实用程序透明地使用rosbag记录的tf数据 借助tf的工具(从控制台通过tf_echo和以编程方式从TransformListener查询),可以在运行时查询tf以进行任意转换。 tf软件包中包含的程序实现了对/tf主题上传入的消息的后台...
bag2video 将rosbag中的图像转换为可变帧率视频。 由于OpenCv无法以可变帧速率进行编码,因此可通过复制帧来实现可变帧速率。 这会产生非常大的文件,应使用ffmpeg之类的文件重新编码。用法 usage: bag2video.py [-h...
此pkg现在是一部分,并移至rosbag_toolkit / bag2mat,请在签出新版本。 bag2mat 提取一个rosbag文件,并根据在Dictionary和yaml配置文件中指定的设置将其转换为matlab mat文件。 字典:字典文件指定应将每种消息...
import rosbag bag_file = 'test.bag' bag = rosbag.Bag(bag_file, "r") 1.2 读取信息 info = bag.get_type_and_topic_info() print(info) 可以得到类似如下的信息: TypesAndTopicsTuple( msg_types={ 'sensor...
模块下载
这是一个semantickitti的 rosbag包。可以播放格式为PointXYZL的点云,以及对应的/tf消息。标签是完全准确的,可以用来测试语义建图算法。
将数据集轻松转换为ROS bag文件! 合作 这个包引起了更多人的浓厚兴趣,这比我一开始就想的要多。 看到这个我真的很高兴。 我看到了许多PR和问题,但是我的日常工作不允许我进一步推进此存储库。 为了使这个程序包...
在目前智能汽车的数据采集(激光雷达数据和视觉数据)的过程中,我们通常在ROS系统中完成数据的记录。因此,我们直接得到的数据是以.bag文件格式保存的。但是,大多数现有感知网络框架的数据格式与 KITTI 数据集的...
rosbag2 用于实现rosbag2的存储库,如其相应的。 安装说明 Debian软件包 rosbag2软件包可通过debian软件包获得,因此可以通过以下方式安装 $ export CHOOSE_ROS_DISTRO=crystal # rosbag2 is available starting ...
ROS机器⼈技术 机器⼈技术-rosbag详细使⽤教程 详细使⽤教程! 在 ROS 系统中,可以使⽤ bag ⽂件来保存和恢复系统的运⾏状态,⽐如录制雷达和相机话题的 bag 包,然后回放⽤来进⾏联合外参标定。 这⾥记录下我学习官...
包含velodyne16线激光雷达点云、经过卡尔曼滤波后的GPS与IMU话题数据(搜到4颗星,已经进入组合导航模式),可用于Cartographer建图,基于组合惯导的点云拼接,惯导与雷达的坐标变换为xyz(0.5,0.2,0),压缩包内...
KITTI Odometry to ROSbag This python tool is aimed to solve the problem that convert kitti odometry to rosbag.Although there is some tool to convert kitti raw data to rosbag. And this tool is ...
rosbag-旋转 将 logrotate 与 rosbag 一起使用并将数据推送到远程服务器的脚本 配置 SSH (可选)在远程机器上创建一个新帐户,并根据需要对其进行限制 在机器人机器上,使用空白密码创建一个新的密钥对 ssh-...
这个命令会找到当前目录下的所有 rosbag 文件,并使用 bzip2 算法进行压缩。这对于管理大量的 ROS 数据非常有用,特别是在需要节省磁盘空间或准备数据迁移时。用于压缩 ROS(Robot Operating System)中的所有 ros...
rosbag控制界面.zip
标签: ros
将文件夹“qt_rosbag”与“rosbash”放到home目录下 新建终端,运行下列语句给权限 sudo chmod -R 777 /home/robot/qt_rosbag sudo chmod -R 777 /home/robot/rosbash /home/robot/qt_rosbag/rosbash.sh 给完权限后...
rosbag 的 C++ API 主要有两个类,用于写bag文件的。可以看到成功写入了4帧数据。类,和用于读bag文件的。编译运行,读取上文生成的。头文件:view.h。
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地