”LiDAR“ 的搜索结果
[科普]一文看懂激光雷达LIDAR基本工作原理
使用3D-3D点对应关系的LiDAR相机校准 , ( ,毗湿 南(Vishnu Radhakrishnan),克里希纳(Krishna) ROS封装,用于校准相机和LiDAR。 该软件包用于通过相机校准LiDAR(配置为支持Hesai和Velodyne硬件)(适用于...
机载激光扫描( Light Detection and Ranging) 技术作为新兴的现代化测量技术,目前广泛用于测绘的各个领域 中,对其数据标准格式( LAS 格式...LiDAR 点云数据的三维可视化,为后期对数据和影像的进一步研究打下了基础。
用于基于图像的3D对象检测的端到端伪LiDAR 该论文已被《计算机视觉与模式识别2020》所接受。 作者: , , , , , , , 和 引文@inproceedings{qian2020end, title={End-to-End Pseudo-LiDAR for Image-Based 3D ...
领取自动驾驶近15个方向学习路线>>点击进入→自动驾驶之心技术交流群本文只做学术分享,如有侵权,联系删文激光雷达定位根据每帧激光雷达点云数据估计传感器在全球中的绝对位置和方向,这是计算机视觉和...
针对这一点,本文提出了LiSA,引入了额外的语义信息来解决这个问题。在推理过程中,只使用LiSA的SCR模块,将冻结的分割模块和知识蒸馏模块丢弃,有效的避免了增加额外的时间和算力开销,满足定位任务最重要的实时性...
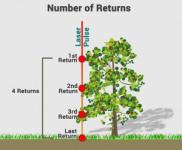
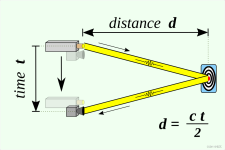
LiDAR是一种主动式遥感技术,通过发射激光束并记录返回的反射信号来测量目标物体的距离、位置和形状。这项技术通常使用激光器来产生短脉冲激光,然后通过接收器接收反射回来的光信号。通过测量激光的时间飞行和接收...
杉川 Lidar x2 系列 激光雷达规格书.pdf
正态分布变换(NDT)算法是一个配准算法,它应用...现实中,LiDAR扫描得到的点云可能和参考点云(如高精地图点云)存在细微的区别,此偏差可能来自于测量误差,也有可能是“场景”发生了一下变化(比如说行人,车辆)。
LI-Calib是用于校准6DoF刚性变换和3D LiDAR与IMU之间的时间偏移的工具包。它基于连续时间的批次优化。基于IMU的成本和LiDAR点到surfel距离共同最小化,这使得校准问题在一般情况下受到了很好的约束。 先决条件 ...
由瑞士苏黎世联邦理工大学自动驾驶实验室开发的lidar_align标定
在具体的工程实践中,lidar在地下停车场容易沿垂直方向向上漂移,导致建图结果不佳。具体原因是当入射角较大时,激光雷达测量的深度可能会出现偏差。因此,当车辆在地面上移动时,从道路上观察到的点会稍微弯曲,LO ...
Lidar和Camera的外参:Lidar和Lidar的外参Lidar和IMU/GNSS的外参Lidar 和 Radar 外参校准数据同步。
运行以下命令以在ros_workspace/src目录中克隆lidar_camera_calibration软件包。 cd ~/ros_workspace/src git clone https://github.com/heethesh/lidar_camera_calibration cd ~/ros_workspace/ catkin_make ...
Camera-LiDAR校准手册 该解决方案提供了一种手动校准Livox LiDAR与摄像机之间的外部参数的方法,该方法已在Mid-40,Horizon和Tele-15系列上得到验证。 它包括相机固有参数的校准,校准数据的获取,相机与LiDAR...
传感器(camera,lidar,IMU,radar)外参标定及在线标定(源码)-多传感器融合感知 ● IMU/GNSS与车体坐标的外参 ● Camera 与 Camera 外参标定 ● Lidar和Camera的外参: ● Lidar和Lidar的外参 ● Lidar和IMU/GNSS的外参...
本文介绍了 SparseLIF,这是一种高性能完全稀疏多模态 3D 物体检测器,其性能优于所有其他密集对应检测器... SparseLIF 通过在查询生成、特征采样和多模态融合三个方面增强丰富 LiDAR 和相机表示的感知来弥补性能差距。
lidar360 2.2版本软件下载
lidar_camera_calib仅供学习参考使用。[TOC]1.基本思想提取图像上标定板的像素坐标,在对应的激光帧中提取标定板的3D角点位置,解决一个2D-3D算Rt的问题.图像上提取角点用 ,激光数据中提标定板参考,这个方法对标定板...
用于单目相机重建的最新技术主要依赖于来自运动恢复结构(SfM)流水线。然而,这种方法通常产生缺乏关键尺度信息的重建结果,并且随着时间的推移,图像的积累导致不可避免的漂移问题。相比之下,基于激光雷达扫描的...
LiDAR Diffusion
标签: 人工智能
本文提出了激光雷达扩散模型(LiDMs),这一模型通过在学习流程中融入几何先验,能够从为捕获激光雷达场景的真实感而定制的隐空间中生成逼真的激光雷达场景。通过这些提出的模块增强,所产生的感知空间使得扩散模型...
MUUFL湾港高光谱和LiDAR数据收集文件 校园1图像的MUUFL Gulfport高光谱数据场景标签 在GoogleEarth KML中标记了此场景的带有地理标签的照片和目标地面的真实位置 公牛目标检测得分码 注意:如果在任何出版物或演示...
多激光雷达标定,配准。基于NDT算法的多激光雷达外参标定的方法和实践。 工程代码是在ROS中间件下完成的。 内涵详细的算法说明和编码流程。 使用的编码语言为C++. 关于激光雷达标定的其他资源: ...
LiDAR-Diffusion
标签: 人工智能
为了在扩散过程中掌握 LiDAR 场景的语意信息,我们的方法在扩散过程之前对LiDAR 场景编码至一个潜式空间中。通过以上提出的模块,扩散模型能够有效地合成高质量的 LiDAR 场景,同时还表现出卓越的性能,与LiDARGen...
运行bash run_kitti_lidar4d.sh后开始训练数据(我还以为是直接有pt文件可以直接输出,难道是nerf里面不能直接使用.pt文件么,本人也是对于整个python以及nerf一窍不通,哈哈),这是正常的情况么? 在运行的时候...
lidar_imu_calib 概述 在基于3D激光雷达的slam开发中,我们经常使用imu为匹配算法(icp,ndt)提供先验,因此需要校准激光雷达和imu之间的变换。对于匹配算法,transfom中的姿态比变换中的位置更重要,并且通常将...
该套件用于通过单眼相机校准2D LiDAR或激光测距仪(LRF)。 特别是,Hokuyo UTM-30LX已成功通过单反相机进行了校准。 但是这种方法实际上是一种幼稚的方法,总之,它只是3D-2D优化问题。 因此,我们决定开发一种新...
给出了一种三角形形变量的定义,并提出了基于不规则三角网(TIN)的LiDAR数据边缘检测新方法。将点LiDAR数据进行三角剖分,生成不规则三角网,计算TIN中每个三角形的形变量,根据三角形形变量的不同来确定处于地物目标...
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地