ROS机器人虚拟仿真挑战赛本地电脑环境配置测试-程序员宅基地
技术标签: 机器人
预备基础
此案例需要完成:
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录-程序员宅基地
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总-程序员宅基地
命令测试
在不同的终端窗口分别输入:
标签1:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch标签2:
rosrun tianracer_gazebo judge_system_node.py如果小车没有移动:


rviz中没有路径规划。
需要查找相应文件修改路径的位置。
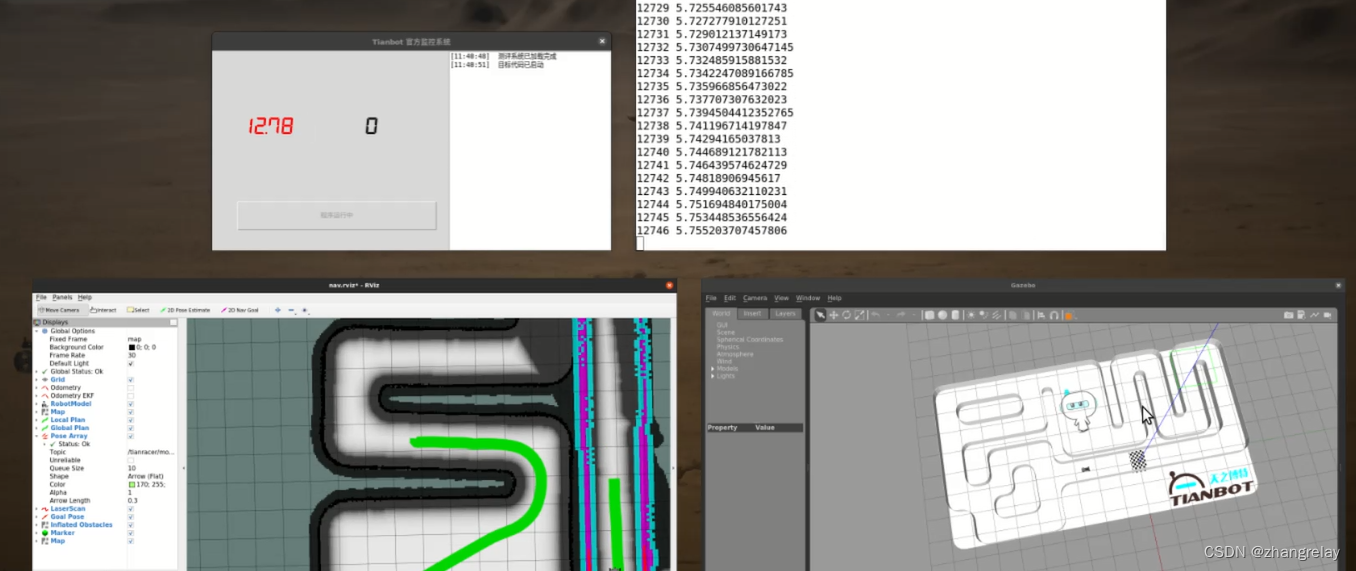
能动起来的rviz和gazebo如下所示:


路径点相关:
阿克曼模型也可以采用类似模式设计控制器。
录屏:
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
轨迹路径问题
本校《移动机器人设计与实践》和《ROS机器人程序设计》均采用课+赛+证结合模式。
参考:
在f1tenth仿真中如何实现更快速的跑圈-曲线分析篇-程序员宅基地
证书
完全自愿参与,无任何强制。
详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,需要完成本地电脑的环境配置。这通常包括安装ROS系统、配置ROS环境变量、安装必要的ROS包以及设置工作空间等。参考“ROS机器人虚拟仿真挑战赛本地电脑环境配置记录”和“个人问题汇总”两篇博客,可以帮助我们避免一些常见的配置错误,并提前解决可能出现的问题。
二、命令测试
在配置好环境后,我们需要在不同的终端窗口输入命令来测试ROS系统的运行情况。
- 标签1命令:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch
这个命令用于启动Tianracer在Gazebo中的仿真,并使用TEB局部规划器进行导航。如果小车没有移动,那么我们需要检查Gazebo和RViz的界面,以及ROS的日志输出,看是否有错误信息。 - 标签2命令:
rosrun tianracer_gazebo judge_system_node.py
这个命令用于运行Tianracer的评分系统节点。如果小车没有移动,评分系统可能无法正常工作。
三、路径规划问题
如果在RViz中没有看到路径规划,那么可能是因为路径规划器没有正确配置或者没有接收到正确的传感器数据。我们需要检查路径规划相关的配置文件,确保路径规划器的参数设置正确,并且传感器数据能够正确传递给路径规划器。
四、轨迹路径问题
差动驱动机器人的轨迹设计是机器人导航的关键部分。阿克曼模型是一种常用的轨迹设计模型,适用于差动驱动机器人。我们可以参考相关博客和教程,学习如何使用阿克曼模型设计机器人的轨迹,并在仿真环境中进行测试。
五、课程与证书
《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程采用课+赛+证结合模式,旨在通过实践和学习,提升学生的机器人设计和编程能力。参加ROS机器人虚拟仿真挑战赛并获得证书,是对自己学习成果的一种肯定,也是对未来求职或深造的有力支持。虽然证书是完全自愿参与的,但获得证书可以作为一种能力的证明,提升自己在相关领域的竞争力。
总的来说,ROS机器人虚拟仿真挑战赛不仅是一个学习和实践的平台,也是一个挑战自我、提升能力的机会。通过参与比赛,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
进一步扩展“ROS机器人虚拟仿真挑战赛”的详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,完成本地电脑的环境配置是不可或缺的第一步。这涉及到对ROS系统的深入理解和一系列复杂的配置步骤。
首先,需要确保已经安装了与挑战赛要求相匹配的ROS发行版。不同的发行版在功能和API上可能有所差异,因此选择正确的发行版至关重要。安装完成后,还需要配置ROS的环境变量,以确保系统能够正确识别ROS的相关路径和命令。
接下来,需要安装必要的ROS包。这些包可能包括用于机器人仿真的Gazebo、用于可视化的RViz、用于路径规划的TEB局部规划器等。安装这些包时,需要注意包的版本和依赖关系,以确保它们能够正常工作。
最后,需要设置ROS的工作空间。工作空间是ROS中用于组织代码和资源的重要概念,它包括了源代码、构建结果和安装目录等。正确设置工作空间可以方便我们对代码进行管理和维护。
在配置过程中,可能会遇到一些个人问题。参考相关的博客和教程,可以帮助我们快速定位并解决问题。同时,也可以加入ROS的社区和论坛,与其他ROS开发者交流经验和技巧。
二、命令测试
完成环境配置后,我们需要通过命令测试来验证ROS系统的运行情况。
首先,通过roslaunch命令启动Tianracer在Gazebo中的仿真。这个命令会加载Tianracer的仿真配置文件,并在Gazebo中创建一个虚拟的机器人环境。如果小车没有移动,我们需要检查Gazebo界面中的机器人模型是否加载成功,以及是否有任何错误或警告信息。
然后,通过rosrun命令运行Tianracer的评分系统节点。这个节点会接收来自仿真环境的数据,并根据一定的规则对机器人的表现进行评分。如果评分系统没有正常工作,我们需要检查节点的日志输出,看是否有任何异常或错误信息。
在测试过程中,我们还可以使用RViz来可视化机器人的状态和轨迹。通过RViz,我们可以直观地看到机器人的位置、朝向以及规划出的路径等信息。如果RViz中没有显示路径规划,我们需要检查路径规划器的配置和传感器数据的传递是否正确。
三、路径规划问题
路径规划是机器人导航的关键部分,它涉及到从起点到终点的最优路径选择。在ROS中,有多种路径规划器可供选择,如全局路径规划器和局部路径规划器等。
对于Tianracer的仿真环境,我们使用了TEB局部规划器进行导航。TEB规划器是一种基于时间弹性的局部路径规划器,它能够在考虑机器人动力学约束的同时优化路径的平滑性和时间效率。然而,如果RViz中没有显示路径规划,那么可能是TEB规划器的配置参数不正确或者传感器数据没有正确传递给规划器。
为了解决这个问题,我们需要检查TEB规划器的配置文件,确保其中的参数设置符合Tianracer机器人的特性和要求。特别是与机器人动力学约束、障碍物避障以及路径平滑性相关的参数,需要进行仔细的调整和测试。
此外,我们还需要确保传感器数据能够正确传递给TEB规划器。这涉及到传感器数据的采集、处理和发布等步骤。我们需要检查传感器的驱动程序和ROS节点是否正常工作,以及传感器数据是否与规划器所需的格式和频率相匹配。
四、轨迹路径问题
差动驱动机器人的轨迹设计是实现自主导航的关键环节。阿克曼模型是一种常用的轨迹设计模型,它适用于差动驱动机器人的运动特性。
在阿克曼模型中,机器人的运动被描述为一系列圆弧和直线的组合。通过合理设计这些圆弧和直线的参数,我们可以实现机器人的平滑运动和精确定位。在ROS中,我们可以使用阿克曼模型来设计机器人的轨迹,并通过控制机器人的线速度和角速度来实现轨迹的跟踪。
然而,轨迹设计并不是一件简单的事情。它需要考虑机器人的动力学约束、环境障碍物以及任务要求等多个因素。为了获得更好的轨迹效果,我们可以使用优化算法对轨迹进行优化,以找到最优的路径和速度组合。
此外,我们还可以通过仿真环境对轨迹进行测试和验证。在Tianracer的仿真环境中,我们可以使用Gazebo和RViz来观察机器人的运动轨迹和状态,并根据测试结果对轨迹进行调整和优化。
五、课程与证书
参与《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程,不仅可以帮助我们深入学习ROS系统和机器人技术,还可以提升我们的实践能力和解决问题的能力。通过课程中的理论学习和实践操作,我们可以掌握ROS的基本概念和工具,了解机器人的感知、决策和控制等方面的知识。
同时,参加ROS机器人虚拟仿真挑战赛并获得证书,是对我们学习成果的一种肯定和认可。证书可以作为我们求职或深造的加分项,提升我们在机器人领域的竞争力。虽然证书是自愿参与的,但获得证书可以激励我们更加努力地学习和实践,提升自己的技能水平。
总之,ROS机器人虚拟仿真挑战赛是一个充满挑战和机遇的平台。通过参与比赛和学习相关
课程,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
六、竞赛经验与学习心得
参与ROS机器人虚拟仿真挑战赛,不仅仅是一个技术层面的挑战,更是一个全方位的学习与成长过程。
在竞赛过程中,我们可能会遇到各种各样的问题和挑战,比如机器人的路径规划失败、传感器数据异常、控制算法不稳定等。这些问题往往需要我们综合运用所学的ROS知识、机器人技术以及编程技能来分析和解决。在解决问题的过程中,我们会不断地尝试、调试和优化,从而逐渐掌握解决问题的方法和技巧。
此外,参与挑战赛还需要我们具备团队合作和沟通的能力。在团队中,每个人都有自己的专长和角色,我们需要相互协作、互相支持,共同完成任务。通过团队合作,我们可以学习到不同人的思维方式和解决问题的方法,提升自己的综合素质。
除了技术和团队方面的收获,参与挑战赛还能让我们更加深入地了解机器人领域的前沿技术和应用。通过与来自不同学校和行业的选手交流,我们可以了解到各种新的想法和解决方案,从而拓宽自己的视野和思路。
总的来说,参与ROS机器人虚拟仿真挑战赛是一次难得的学习和成长机会。通过挑战和锻炼,我们可以不断提升自己的技能水平和综合素质,为未来的职业发展做好充分的准备。
七、未来展望
随着机器人技术的不断发展和普及,ROS作为机器人领域的开源框架,其重要性和影响力也在不断提升。未来,ROS将在更多领域得到应用,包括工业自动化、智能家居、医疗服务等。
对于个人而言,掌握ROS技能和机器人技术将是我们未来职业发展的重要方向之一。通过不断学习和实践,我们可以将ROS应用于实际项目中,为企业和社会创造价值。同时,我们也可以利用ROS平台开展创新研究和探索,为机器人领域的发展做出贡献。
总之,ROS机器人虚拟仿真挑战赛只是我们学习和探索机器人技术的一个起点。未来,我们将继续深入学习和实践,不断提升自己的技能水平和综合素质,为机器人领域的发展贡献自己的力量。
智能推荐
海康威视网络摄像头开发流程(五)------- 直播页面测试_ezuikit 测试的url-程序员宅基地
文章浏览阅读3.8k次。1、将下载好的萤石js插件,添加到SoringBoot项目中。位置可参考下图所示。(容易出错的地方,在将js插件在html页面引入时,发生路径错误的问题)所以如果对页面中引入js的路径不清楚,可参考下图所示存放路径。2、将ezuikit.js引入到demo-live.html中。(可直接将如下代码复制到你创建的html页面中)<!DOCTYPE html><html lan..._ezuikit 测试的url
如何确定组态王与多动能RTU的通信方式_组态王ua-程序员宅基地
文章浏览阅读322次。第二步,在弹出的对话框选择,设备驱动—>PLC—>莫迪康—>ModbusRTU—>COM,根据配置软件选择的协议选期期,这里以此为例,然后点击“下一步”。第四步,把使用虚拟串口打勾(GPRS设备),根据需要选择要生成虚拟口,这里以选择KVCOM1为例,然后点击“下一步”设备ID即Modbus地址(1-255) 使用DTU时,为下485接口上的设备地址。第六步,Modbus的从机地址,与配置软件相同,这里以1为例,点击“下一步“第五步,Modbus的从机地址,与配置软件相同,这里以1为例,点击“下一步“_组态王ua
npm超详细安装(包括配置环境变量)!!!npm安装教程(node.js安装教程)_npm安装配置-程序员宅基地
文章浏览阅读9.4k次,点赞22次,收藏19次。安装npm相当于安装node.js,Node.js已自带npm,安装Node.js时会一起安装,npm的作用就是对Node.js依赖的包进行管理,也可以理解为用来安装/卸载Node.js需要装的东西_npm安装配置
火车头采集器AI伪原创【php源码】-程序员宅基地
文章浏览阅读748次,点赞21次,收藏26次。大家好,小编来为大家解答以下问题,python基础训练100题,python入门100例题,现在让我们一起来看看吧!宝子们还在新手村练级的时候,不单要吸入基础知识,夯实自己的理论基础,还要去实际操作练练手啊!由于文章篇幅限制,不可能将100道题全部呈现在此除了这些,下面还有我整理好的基础入门学习资料,视频和讲解文案都很齐全,用来入门绝对靠谱,需要的自提。保证100%免费这不,贴心的我爆肝给大家整理了这份今天给大家分享100道Python练习题。大家一定要给我三连啊~
Linux Ubuntu 安装 Sublime Text (无法使用 wget 命令,使用安装包下载)_ubuntu 安装sumlime text打不开-程序员宅基地
文章浏览阅读1k次。 为了在 Linux ( Ubuntu) 上安装sublime,一般大家都会选择常见的教程或是 sublime 官网教程,然而在国内这种方法可能失效。为此,需要用安装包安装。以下就是使用官网安装包安装的教程。打开 sublime 官网后,点击右上角 download, 或是直接访问点击打开链接,即可看到各个平台上的安装包。选择 Linux 64 位版并下载。下载后,打开终端,进入安装..._ubuntu 安装sumlime text打不开
CrossOver for Mac 2024无需安装 Windows 即可以在 Mac 上运行游戏 Mac运行exe程序和游戏 CrossOver虚拟机 crossover运行免安装游戏包-程序员宅基地
文章浏览阅读563次,点赞13次,收藏6次。CrossOver24是一款类虚拟机软件,专为macOS和Linux用户设计。它的核心技术是Wine,这是一种在Linux和macOS等非Windows操作系统上运行Windows应用程序的开源软件。通过CrossOver24,用户可以在不购买Windows授权或使用传统虚拟机的情况下,直接在Mac或Linux系统上运行Windows软件和游戏。该软件还提供了丰富的功能,如自动配置、无缝集成和实时传输等,以实现高效的跨平台操作体验。
随便推点
一个用聊天的方式让ChatGPT写的线程安全的环形List_为什么gpt一写list就卡-程序员宅基地
文章浏览阅读1.7k次。一个用聊天的方式让ChatGPT帮我写的线程安全的环形List_为什么gpt一写list就卡
Tomcat自带的设置编码Filter-程序员宅基地
文章浏览阅读336次。我们在前面的文章里曾写过Web应用中乱码产生的原因和处理方式,旧文回顾:深度揭秘乱码问题背后的原因及解决方式其中我们提到可以通过Filter的方式来设置请求和响应的encoding,来解..._filterconfig selectencoding
javascript中encodeURI和decodeURI方法使用介绍_js encodeur decodeurl-程序员宅基地
文章浏览阅读651次。转自:http://www.jb51.net/article/36480.htmencodeURI和decodeURI是成对来使用的,因为浏览器的地址栏有中文字符的话,可以会出现不可预期的错误,所以可以encodeURI把非英文字符转化为英文编码,decodeURI可以用来把字符还原回来_js encodeur decodeurl
Android开发——打包apk遇到The destination folder does not exist or is not writeable-程序员宅基地
文章浏览阅读1.9w次,点赞6次,收藏3次。前言在日常的Android开发当中,我们肯定要打包apk。但是今天我打包的时候遇到一个很奇怪的问题Android The destination folder does not exist or is not writeable,大意是目标文件夹不存在或不可写。出现问题的原因以及解决办法上面有说报错的中文大意是:目标文件夹不存在或不可写。其实问题就在我们的打包界面当中图中标红的Desti..._the destination folder does not exist or is not writeable
Eclipse配置高大上环境-程序员宅基地
文章浏览阅读94次。一、配置代码编辑区的样式 <1>打开Eclipse,Help —> Install NewSoftware,界面如下: <2>点击add...,按下图所示操作: name:随意填写,Location:http://eclipse-color-th..._ecplise高大上设置
Linux安装MySQL-5.6.24-1.linux_glibc2.5.x86_64.rpm-bundle.tar_linux mysql 安装 mysql-5.6.24-1.linux_glibc2.5.x86_6-程序员宅基地
文章浏览阅读2.8k次。一,下载mysql:http://dev.mysql.com/downloads/mysql/; 打开页面之后,在Select Platform:下选择linux Generic,如果没有出现Linux的选项,请换一个浏览器试试。我用的谷歌版本不可以,换一个别的浏览器就行了,如果还是不行,需要换一个翻墙的浏览器。 二,下载完后解压缩并放到安装文件夹下: 1、MySQL-client-5.6.2_linux mysql 安装 mysql-5.6.24-1.linux_glibc2.5.x86_64.rpm-bundle