秒懂函数回调机制,回调函数看这篇就够了-程序员宅基地
什么是回调函数
友情提示:原理介绍部分摘自:https://www.jianshu.com/p/2f695d6fd64f
有一定基础的直接跳过即可,直接查看后面精彩部分...
回调函数就是一个通过函数指针调用的函数。如果你把函数的指针(地址)作为参数传递给另一个函数,当这个指针被用来调用其所指向的函数时,我们就说这是回调函数。回调函数不是由该函数的实现方直接调用,而是在特定的事件或条件发生时由另外的一方调用的,用于对该事件或条件进行响应。
一幅图来说明什么是回调:
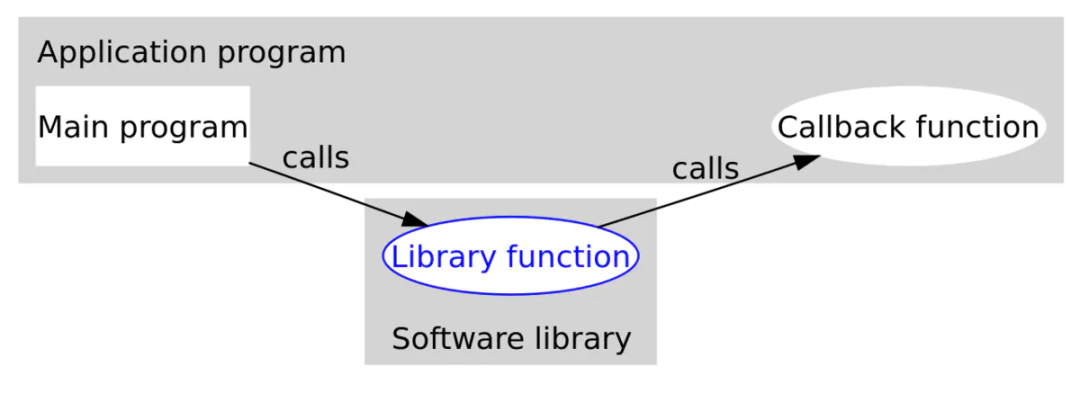
结合这幅图和上面对回调函数的解释,我们可以发现,要实现回调函数,最关键的一点就是要将函数的指针传递给一个函数(上图中是库函数),然后这个函数就可以通过这个指针来调用回调函数了。注意,回调函数并不是C语言特有的,几乎任何语言都有回调函数。在C语言中,我们通过使用函数指针来实现回调函数。那函数指针是什么?不着急,下面我们就先来看看什么是函数指针。
什么是函数指针
函数指针也是一种指针,只是它指向的不是整型,字符型而是函数。在C中,每个函数在编译后都是存储在内存中,并且每个函数都有一个入口地址,根据这个地址,我们便可以访问并使用这个函数。函数指针就是通过指向这个函数的入口,从而调用这个函数。
函数指针的定义
函数指针虽然也是指针,但它的定义方式却和其他指针看上去很不一样,我们来看看它是如何定义的:
/* 方法1 */
void (*p_func)(int, int, float) = NULL;
/* 方法2 */
typedef void (*tp_func)(int, int, float);
tp_func p_func = NULL;这两种方式都是定义了一个指向返回值为 void 类型,参数为 (int, int, float) 的函数指针。第二种方法是为了让函数指针更容易理解,尤其是在复杂的环境下;而对于一般的函数指针,直接用第一种方法就行了。
函数指针的赋值
在定义完函数指针后,我们就需要给它赋值了我们有两种方式对函数指针进行赋值:
void (*p_func)(int, int, float) = NULL;
p_func = &func1;
p_func = func2;上面两种方法都是合法的,对于第二种方法,编译器会隐式地将 func_2 由 void ()(int, int, float) 类型转换成 void (*)(int, int, float) 类型,因此,这两种方法都行。想要了解更详细的说明,可以看看下面这个stackoverflow的链接。
使用函数指针调用函数
因为函数指针也是指针,因此可以使用常规的带 * 的方法来调用函数。和函数指针的赋值一样,我们也可以使用两种方法:
/* 方法1 */
int val1 = p_func(1,2,3.0);
/* 方法2 */
int val2 = (*p_func)(1,2,3.0);方法1和我们平时直接调用函数是一样的,方法2则是用了 * 对函数指针取值,从而实现对函数的调用。
将函数指针作为参数传给函数
函数指针和普通指针一样,我们可以将它作为函数的参数传递给函数,下面我们看看如何实现函数指针的传参:
/* func3 将函数指针 p_func 作为其形参 */
void func3(int a, int b, float c, void (*p_func)(int, int, float))
{
(*p_func)(a, b, c);
}
/* func4 调用函数func3 */
void func4()
{
func3(1, 2, 3.0, func_1);
/* 或者 func3(1, 2, 3.0, &func_1); */
}函数指针数组
在开始讲解回调函数前,最后介绍一下函数指针数组。既然函数指针也是指针,那我们就可以用数组来存放函数指针。下面我们看一个函数指针数组的例子:
/* 方法1 */
void (*func_array_1[5])(int, int, float);
/* 方法2 */
typedef void (*p_func_array)(int, int, float);
p_func_array func_array_2[5];上面两种方法都可以用来定义函数指针数组,它们定义了一个元素个数为5,类型是 void (*)(int, int, float) 的函数指针数组。
回调函数
我们前面谈的都是函数指针,现在我们回到正题,来看看回调函数到底是怎样实现的。下面是一个四则运算的简单回调函数例子:
#include <stdio.h>
#include <stdlib.h>
/****************************************
* 函数指针结构体
***************************************/
typedef struct _OP {
float (*p_add)(float, float);
float (*p_sub)(float, float);
float (*p_mul)(float, float);
float (*p_div)(float, float);
} OP;
/****************************************
* 加减乘除函数
***************************************/
float ADD(float a, float b)
{
return a + b;
}
float SUB(float a, float b)
{
return a - b;
}
float MUL(float a, float b)
{
return a * b;
}
float DIV(float a, float b)
{
return a / b;
}
/****************************************
* 初始化函数指针
***************************************/
void init_op(OP *op)
{
op->p_add = ADD;
op->p_sub = SUB;
op->p_mul = &MUL;
op->p_div = &DIV;
}
/****************************************
* 库函数
***************************************/
float add_sub_mul_div(float a, float b, float (*op_func)(float, float))
{
return (*op_func)(a, b);
}
int main(int argc, char *argv[])
{
OP *op = (OP *)malloc(sizeof(OP));
init_op(op);
/* 直接使用函数指针调用函数 */
printf("ADD = %f, SUB = %f, MUL = %f, DIV = %f\n", (op->p_add)(1.3, 2.2), (*op->p_sub)(1.3, 2.2),
(op->p_mul)(1.3, 2.2), (*op->p_div)(1.3, 2.2));
/* 调用回调函数 */
printf("ADD = %f, SUB = %f, MUL = %f, DIV = %f\n",
add_sub_mul_div(1.3, 2.2, ADD),
add_sub_mul_div(1.3, 2.2, SUB),
add_sub_mul_div(1.3, 2.2, MUL),
add_sub_mul_div(1.3, 2.2, DIV));
return 0;
}这个例子有点长,我一步步地来讲解如何使用回调函数。
第一步
要完成加减乘除,我们需要定义四个函数分别实现加减乘除的运算功能,这几个函数就是:
/****************************************
* 加减乘除函数
***************************************/
float ADD(float a, float b)
{
return a + b;
}
float SUB(float a, float b)
{
return a - b;
}
float MUL(float a, float b)
{
return a * b;
}
float DIV(float a, float b)
{
return a / b;
}第二步
我们需要定义四个函数指针分别指向这四个函数:
/****************************************
* 函数指针结构体
***************************************/
typedef struct _OP {
float (*p_add)(float, float);
float (*p_sub)(float, float);
float (*p_mul)(float, float);
float (*p_div)(float, float);
} OP;
/****************************************
* 初始化函数指针
***************************************/
void init_op(OP *op)
{
op->p_add = ADD;
op->p_sub = SUB;
op->p_mul = &MUL;
op->p_div = &DIV;
}第三步
我们需要创建一个“库函数”,这个函数以函数指针为参数,通过它来调用不同的函数:
/****************************************
* 库函数
***************************************/
float add_sub_mul_div(float a, float b, float (*op_func)(float, float))
{
return (*op_func)(a, b);
}第四步
当这几部都完成后,我们就可以开始调用回调函数了:
/* 调用回调函数 */
printf("ADD = %f, SUB = %f, MUL = %f, DIV = %f\n",
add_sub_mul_div(1.3, 2.2, op->p_add),
add_sub_mul_div(1.3, 2.2, op->p_sub),
add_sub_mul_div(1.3, 2.2, MUL),
add_sub_mul_div(1.3, 2.2, DIV));简单的四步便可以实现回调函数。在这四步中,我们甚至可以省略第二步,直接将函数名传入“库函数”,比如上面的乘法和除法运算。回调函数的核心就是函数指针,只要搞懂了函数指针再学回调函数,那真是手到擒来了。
回调函数在嵌入式系统中的应用
在stm32的HAL库中,是使用了大量的回调函数的,串口、定时器等外设都是有对应的回调函数的,回调机制可以更好地分离代码,应用层和驱动层完全分离,降低耦合性。
简单来看几个例子:
串口回调函数:
void HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortCpltCallback (UART_HandleTypeDef *huart);
void HAL_UART_AbortTransmitCpltCallback (UART_HandleTypeDef *huart);
void HAL_UART_AbortReceiveCpltCallback (UART_HandleTypeDef *huart);使用的时候,我们只需要把串口解析处理逻辑放在对应的回调函数中处理即可
拿串口接收来举例,定义的是一个弱函数,我们在自己的文件中重新实现就好
/**
* @brief Rx Transfer completed callbacks.
* @param huart pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @retval None
*/
__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_TxCpltCallback could be implemented in the user file
*/
}/**
* @brief 串口中断回调函数
*
* @param
* @param
* @retval none
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
Voice_RecUartCallBack();
}
else if (huart->Instance == USART2)
{
Voice_RecUartCallBack();
}
}HAL库中的回调思想是有了,但代码实现略微有点“嵌入式”,接下来看点“程序员”的写法,以我们之前介绍的软件定时器一文,结合上面介绍的原理:
/* soft timer device */
typedef struct class_soft_timer
{
e_timer_work_mode_t mode; //工作模式
uint16_t cnt_aim; //目标计数值
uint16_t cnt_now; //当前的计数值
uint8_t timeout; //表示到计数值了
uint8_t enable; //表示timer是否开启
struct class_soft_timer *timer_next; //指向下一个timer
void *para; //回调函数的参数
soft_timer_call_back *timer_cb; //回调函数
} c_soft_timer_t;从上面的代码中我们可以看到,软件定时器的一些参数设置和最后一项的回调函数
软件定时器实现的一些方法:
/* soft timer operate define */
typedef struct class_sotft_timer_operation
{
c_soft_timer_t *(*add_new_timer)(e_timer_work_mode_t mode, uint16_t tim, void *para, soft_timer_call_back tim_cb); //添加一个新的timer
e_soft_timer_state_t (*delete_timer)(c_soft_timer_t *timer); //删除一个timer
e_soft_timer_state_t (*timer_set_period)(c_soft_timer_t *timer, uint16_t period); //设置定时周期
e_soft_timer_state_t (*timer_reload_cnt)(c_soft_timer_t *timer, uint16_t tim_cnt); //重新设置计数值
e_soft_timer_state_t (*timer_heart)(void); //soft timer heart
e_soft_timer_state_t (*timer_handle)(void); //soft timer handle
e_soft_timer_state_t (*timer_start)(void); //soft timer module start
e_soft_timer_state_t (*timer_stop)(void); //soft timer module stop
e_soft_timer_state_t (*timer_enable)(c_soft_timer_t *timer); //timer enable
e_soft_timer_state_t (*timer_disable)(c_soft_timer_t *timer); //timer disable
} c_soft_timer_ops_t;看了上面的代码,跟开始的原理介绍找到了对应了吧,那么怎么使用呢?不慌,继续看...
在初始化中,我们把这些定义的函数指针指向我们实际实现的函数即可:
/*
* *@ author:lanxin
* *@ brief:sotf timer module init
* *@ note:初始化完成之后,就可以使用全部的功能了
* *@ param:NONE
* *@ retval:result != SOFT_TIMER_STATE_OK faild
*/
e_soft_timer_state_t fs_soft_timer_module_init(void)
{
/* creat timer operation index */
static c_soft_timer_ops_t *timer_ops_temp=0X00;
timer_ops_temp=(c_soft_timer_ops_t*)malloc(sizeof(c_soft_timer_ops_t));
if(timer_ops_temp != 0x00)
{
/* add soft timer operate function*/
timer_ops_temp->add_new_timer=add_new_timer;
timer_ops_temp->delete_timer=delete_timer;
timer_ops_temp->timer_heart=fs_soft_timer_heart;
timer_ops_temp->timer_handle=fs_soft_timer_handle;
timer_ops_temp->timer_start=fs_soft_timer_module_start;
timer_ops_temp->timer_stop=fs_soft_timer_module_stop;
timer_ops_temp->timer_set_period=fs_timer_set_period;
timer_ops_temp->timer_disable=fs_soft_timer_disable;
timer_ops_temp->timer_enable=fs_soft_timer_enable;
timer_ops_temp->timer_reload_cnt=fs_timer_reload_cnt;
}
/* creat timer manage index*/
c_soft_timer_manage_t *timer_manage_temp=0x00;
timer_manage_temp=(c_soft_timer_manage_t *)malloc(sizeof(c_soft_timer_manage_t));
/* 添加信息 */
if(timer_manage_temp != 0x00)
{
timer_manage_temp->timer_head=0x00;
timer_manage_temp->timer_total_num=0;
timer_manage_temp->timer_module_enable=SOFT_TIMER_MODULE_START;
soft_timer_manage=timer_manage_temp;
}
else
{
free(timer_manage_temp);
free(timer_ops_temp);
return SOFT_TIMER_STATE_ERR;
}
tim_ops=timer_ops_temp;
return SOFT_TIMER_STATE_OK;
}举一个例子:
timer_ops_temp->add_new_timer=add_new_timer;我们只需要把要处理的逻辑放在以下函数中即可,最后一个参数是传入的函数,也即是将函数指针作为参数传给函数:
/*
* *@ author:lanxin
* *@ brief:添加新的timer
* *@ note:如果之后要操作这个定时器,就得保存下来timer句柄,不操作就不用管。
* *@ param:mode 工作模式
* *@ param:tim 定时周期
* *@ param:para 回调函数的参数
* *@ param:tim_cb 回调函数
* *@ retval:新的timer 的句柄,
*/
static c_soft_timer_t* add_new_timer(e_timer_work_mode_t mode,uint16_t tim,void *para,soft_timer_call_back tim_cb)
{
if(fs_add_new_soft_timer(mode,tim,para,tim_cb) == SOFT_TIMER_STATE_OK)
{
return soft_timer_manage->timer_head->timer_next;//新添加的timer在timer 链表的第二个。
}
return 0x00;
}物联网编程中的回调函数应用
接下来看看网络编程中的回调函数应用,以MQTT的使用为例,小飞哥是使用的rt-thread中的pahomqtt使用例子:
static int mqtt_start(int argc, char **argv)
{
/* init condata param by using MQTTPacket_connectData_initializer */
MQTTPacket_connectData condata = MQTTPacket_connectData_initializer;
static char cid[20] = { 0 };
if (argc != 1)
{
rt_kprintf("mqtt_start --start a mqtt worker thread.\n");
return -1;
}
if (is_started)
{
LOG_E("mqtt client is already connected.");
return -1;
}
...
/* set event callback function */
client.connect_callback = mqtt_connect_callback;
client.online_callback = mqtt_online_callback;
client.offline_callback = mqtt_offline_callback;
/* set subscribe table and event callback */
client.messageHandlers[0].topicFilter = rt_strdup(MQTT_SUBTOPIC);
client.messageHandlers[0].callback = mqtt_sub_callback;
client.messageHandlers[0].qos = QOS1;
/* set default subscribe event callback */
client.defaultMessageHandler = mqtt_sub_default_callback;
}
/* run mqtt client */
paho_mqtt_start(&client);
is_started = 1;
return 0;
}static void mqtt_sub_callback(MQTTClient *c, MessageData *msg_data)
{
*((char *)msg_data->message->payload + msg_data->message->payloadlen) = '\0';
LOG_D("mqtt sub callback: %.*s %.*s",
msg_data->topicName->lenstring.len,
msg_data->topicName->lenstring.data,
msg_data->message->payloadlen,
(char *)msg_data->message->payload);
}
static void mqtt_sub_default_callback(MQTTClient *c, MessageData *msg_data)
{
*((char *)msg_data->message->payload + msg_data->message->payloadlen) = '\0';
LOG_D("mqtt sub default callback: %.*s %.*s",
msg_data->topicName->lenstring.len,
msg_data->topicName->lenstring.data,
msg_data->message->payloadlen,
(char *)msg_data->message->payload);
}
static void mqtt_connect_callback(MQTTClient *c)
{
LOG_D("inter mqtt_connect_callback!");
}
static void mqtt_online_callback(MQTTClient *c)
{
LOG_D("inter mqtt_online_callback!");
}
static void mqtt_offline_callback(MQTTClient *c)
{
LOG_D("inter mqtt_offline_callback!");
}从以上代码中,我们可以看到,代码为上线、离线、发布、订阅等每一个功能都设置了对应的回调函数,这样代码结构看起来会非常的清朗,便于维护,如需要修改某一个功能的逻辑,直接找到对应的回调函数,而不是看一大堆代码去找对应的功能。
回调函数在命令解析中应用思考
再想想,我们在数据逻辑处理中,一般会有很多的功能码,如果我们采用命令码和回调函数绑定的方式,那代码维护起来是不是很方便...
经典写法:
void poll_task(rt_uint8_t cmd, rt_uint8_t *msg, uint8_t len)
{
switch (cmd){
case cmd1:
func1();
break;
case cmd2:
func2();
break;
case cmd3:
func3();
break;
case cmd4:
func4();
break;
default:
default_func();
break;
}
}如果采用命令和回调函数绑定的方式怎么写呢?
typedef struct
{
rt_uint8_t CMD;
rt_uint8_t (*callback_func)(rt_uint8_t cmd, rt_uint8_t *msg, uint8_t len);
} _FUNCCALLBACK;
_FUNCCALLBACK callback_list[]=
{
{ cmd1,func_callback1},
{ cmd2,func_callback2},
{ cmd3,func_callback3},
{ cmd4,func_callback41},
...
};
void poll_task(rt_uint8_t cmd, rt_uint8_t *msg, uint8_t len)
{
int cmd_indexmax = sizeof(callback_list) / sizeof(_FUNCCALLBACK);
int cmd_index = 0;
for (cmd_index = 0; cmd_index < cmd_indexmax; cmd_index++)
{
if (callback_list[cmd_index].CMD == cmd)
{
if(callback_list[cmd_index])
{
/*
处理逻辑
*/
}
}
}
}二者相比有什么区别呢?假设我们需要新增几个命令码,第一种方式,我们就需要在主函数中去改变,看一堆代码,很容易误操作影响代码的整体结构,但第二种就不会,我们只需要在结构体中新增命令和回调函数即可,主运行逻辑不需要去修改,大大降低代码的可维护性。
智能推荐
VB与IE浏览器交互——自动填表_vb打开ie并写入-程序员宅基地
文章浏览阅读8.4k次。VB填充IE上的输入框并提交 假设登录页面的HTML代码如下: testPage 用户: _vb打开ie并写入
HTML常用标签超详细整理_html正文标签-程序员宅基地
文章浏览阅读2.6w次,点赞40次,收藏341次。HTML概述1.1 什么是HTMLHTML是做网站的、Web开发、互联网生态开发(PC端+移动端+微应用) 目前我们使用的都是HTML5,支持传统的PC端开发,还支持移动端开发还支持微应用开发,从而替换了部分传统的移动端开发技术1.2 HTML概念HTML:Hyper Text Markup Language,超文本标记语言。是用来帮助我们构建网页的。【超文本】:网页本身是一个文本文件,而超文本指的是这种文件中既可以包含文本信息,又可以包含图片,音频,视频和链接等非文字的信息。_html正文标签
Android Camera 预览尺寸的选取与旋转角度的设定_android camera.setdisplayorientation-程序员宅基地
文章浏览阅读811次。关于相机预览尺寸的选取和旋转角度的设定到这里便分析结束了, 这里再简单的回顾一下相机预览尺寸的选取统计相机支持的预览尺寸, 按照比例归类从用户传入的比例中找寻与 View 尺寸相当的作为预览尺寸相机旋转角度的设定sensor 坐标系sensor 坐标系图像映射到屏幕坐标系对图像进行校正以确认最终的旋转角度其中 旋转角度的设定 较之 尺寸的选取 要更为困难, 其中牵扯到坐标系的映射和映射后的旋转, 前置相机还需要考虑镜像的抵消, 不过所幸这里将其梳理清楚了。_android camera.setdisplayorientation
linux zip分卷压缩和解压缩_linux解压分卷压缩包-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏13次。假设待压缩的是data/目录。_linux解压分卷压缩包
uniapp 集成七牛云,上传图片_uniapp七牛云上传图片-程序员宅基地
文章浏览阅读2k次。4 相册选择照片,或者拍照后,使用上传代码。_uniapp七牛云上传图片
Java将前端传入的Zip文件解压成MultipartFile集合对象_解压multipartfile-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏4次。使用Java将Zip文件格式解压成MultipartFile集合对象_解压multipartfile
随便推点
价格数值 转换 parseFloat() 的用法_价格类变量数据转换-程序员宅基地
文章浏览阅读722次。document.write(parseFloat("10.00") + "<br>");document.write(parseFloat("10.30") + "<br>");document.write(parseFloat("10.33") + "<br>");// 结果为1010.310.33parseFloat() 函数可解..._价格类变量数据转换
crout分解计算例题_小学数学重难点:六年级数学分数除法知识点、例题及练习题...-程序员宅基地
文章浏览阅读563次。点上方↑“小学生阅读”关注更多资讯 !温馨提示:茫茫人海,为防大家走失,请点击上方“小学生阅读” →点击右上角“...”→点选“设为星标★”为小学生阅读加上星标,就再也不会迷路啦!●如果一个人没有在童年时期就体验过面对书籍进行深思的激动人心的欢乐,那就很难设想会有完满的教育。——苏霍姆林斯基分数除法知识点(一)倒数1、倒数的意义:乘积是1的两个数互为倒数。强调:互为倒数..._多几分之几知识点
系统安装方法(Windows,Linux双版本)_pc安装 windows 跟linux系统-程序员宅基地
文章浏览阅读750次。文章目录前言一、准备工作1.系统安装文件下载2.烧写软件3.u盘介质二、制作启动盘1.格式化u盘2.读入数据三、修改BIOS设置四、安装系统1.Windows系统安装2.Linux系统安装总结前言提示:这里可以添加本文要记录的大概内容:我发现现在好多人装系统都被引入了一个误区,一说起装系统,就认为那是很难的操作,非专业人员不可以乱动,会搞坏电脑等等,其实装系统并不难,看完这篇文章让小白学会装系统一、准备工作1.系统安装文件下载系统安装文件也叫做系统镜像,我这里使用的是 MSDN这个工具站,它_pc安装 windows 跟linux系统
使用html2canvas和jspdf生成的pdf 防止文字被切割_jspdf+html2canvas 转pdf 分页时会把内容切割-程序员宅基地
文章浏览阅读268次。网页导出pdf 防止内容被切断_jspdf+html2canvas 转pdf 分页时会把内容切割
【翻译篇】❀ 02. 系统设置 - 连接到 Web UI 或 CLI ❀ FortiMail 管理手册 6.0.4_fortimail命令行配置路由-程序员宅基地
文章浏览阅读668次。02. 系统设置_fortimail命令行配置路由
若特征的相关系数为0或接近0,就一定可以被过滤吗?相关系数的显著性检验也不一定可靠,如何判断?_相关系数为正但接近0-程序员宅基地
文章浏览阅读458次。若特征的相关系数为0或接近0,就一定可以被过滤吗?相关系数的显著性检验也不一定可靠,如何判断?_相关系数为正但接近0