蓝桥杯单片机温度传感器DS18B20(基于STC15F2K60S2)_stc15f2k60s2单片机读取ds18b20温度检测-程序员宅基地

可以看到,温度传感器DS18B20接在P14上并进行了上拉
sbit DQ=P1^4;我们通过单总线端口对温度传感器进行控制,步骤如下:

需要注意的是,通过单线总线的所有执行(处理)都从一个初始化序列开始。也就是说所有的操作前都需要初始化一次。
那么先要进行初始化:
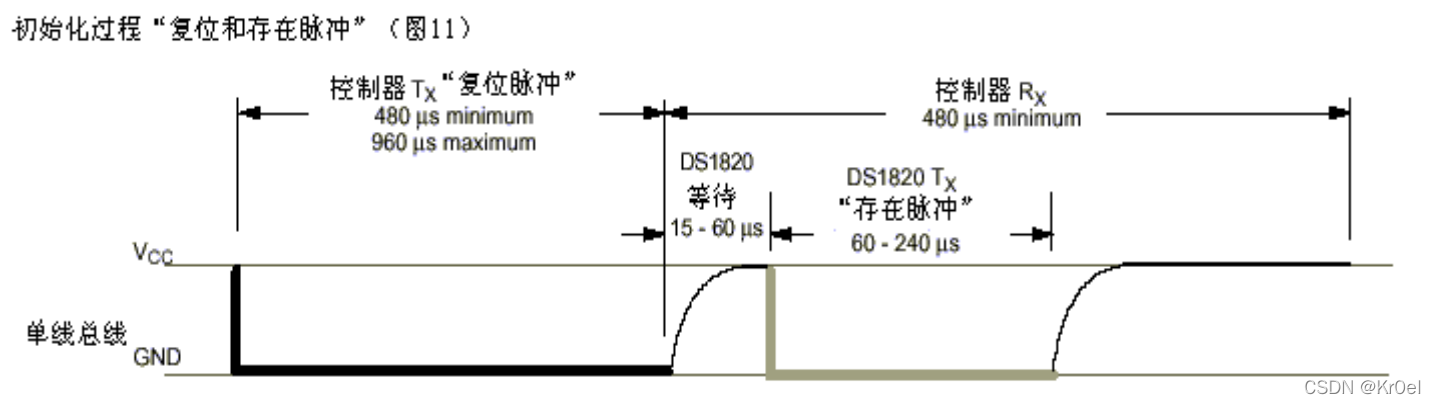
根据时序图可以看出,我们需要先拉低,等待480us再拉高,接下来传感器自己拉低,控制完成
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}初始化完成之后,就可以开始操作了
这时候我们需要用到ROM指令,主要用到三种:忽略、温度转换和读暂存器
第一种:忽略ROM指令

常规来讲,我们需要进行ROM识别来确定到自己想用的外设,但是P14上只有一个温度传感器,所以不需要识别,直接忽略即可
DS18B20_WriteByte(0XCC);第二种:温度转换指令

Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);第三种:读暂存器指令

在暂存器前需要进行初始化
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0XBE);读数据的过程:
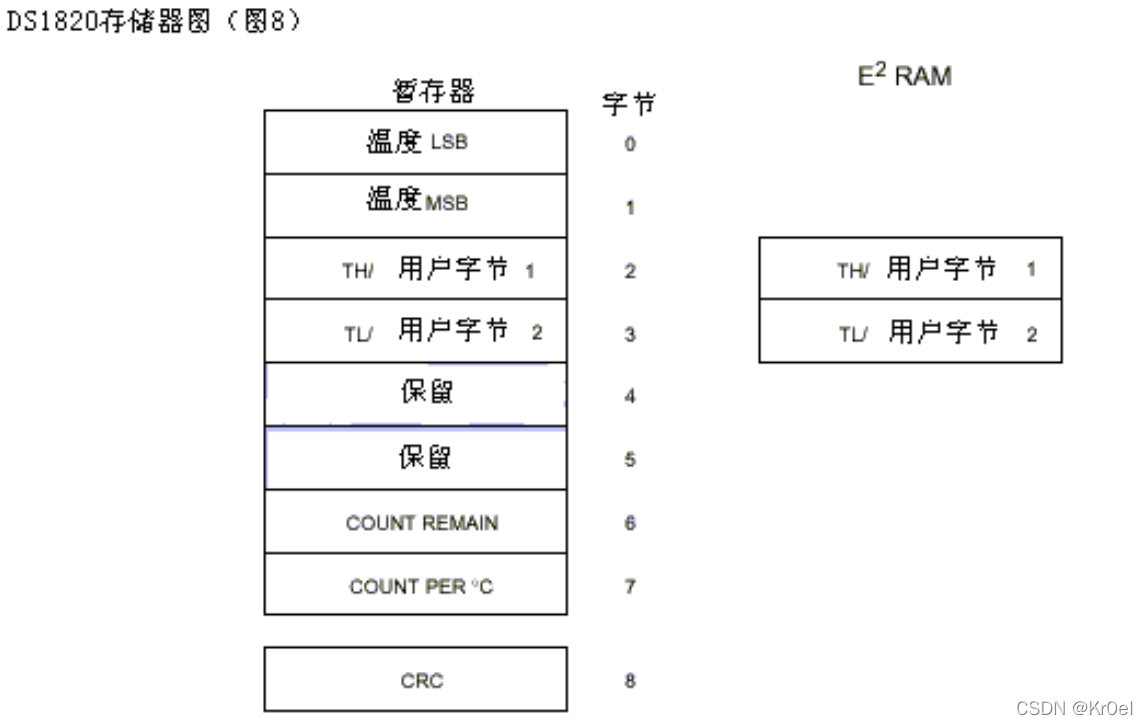
从上到下依次进行读,我们只需要第一、二次读的温度低八位和高八位就够了
low=DS18B20_ReadByte();//第一次读低八位(byte0)
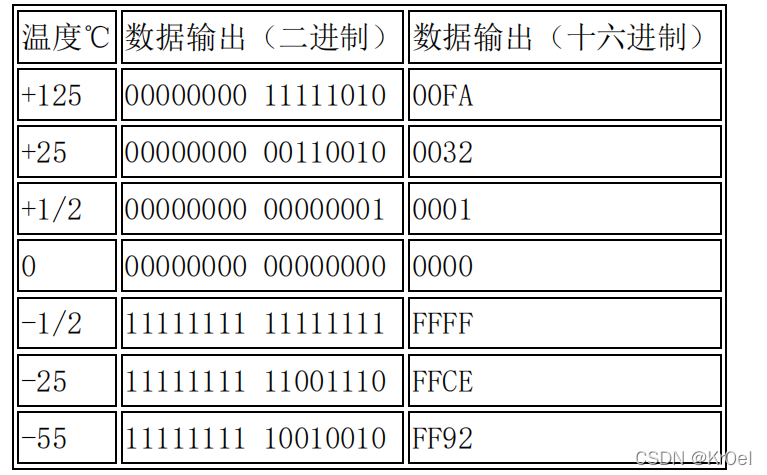
high=DS18B20_ReadByte();//第二次读高八位(byte1)温度/数据关系:
读写时序
这里注意所有的数据和指令的传递都是从最低有效位开始
写时序:
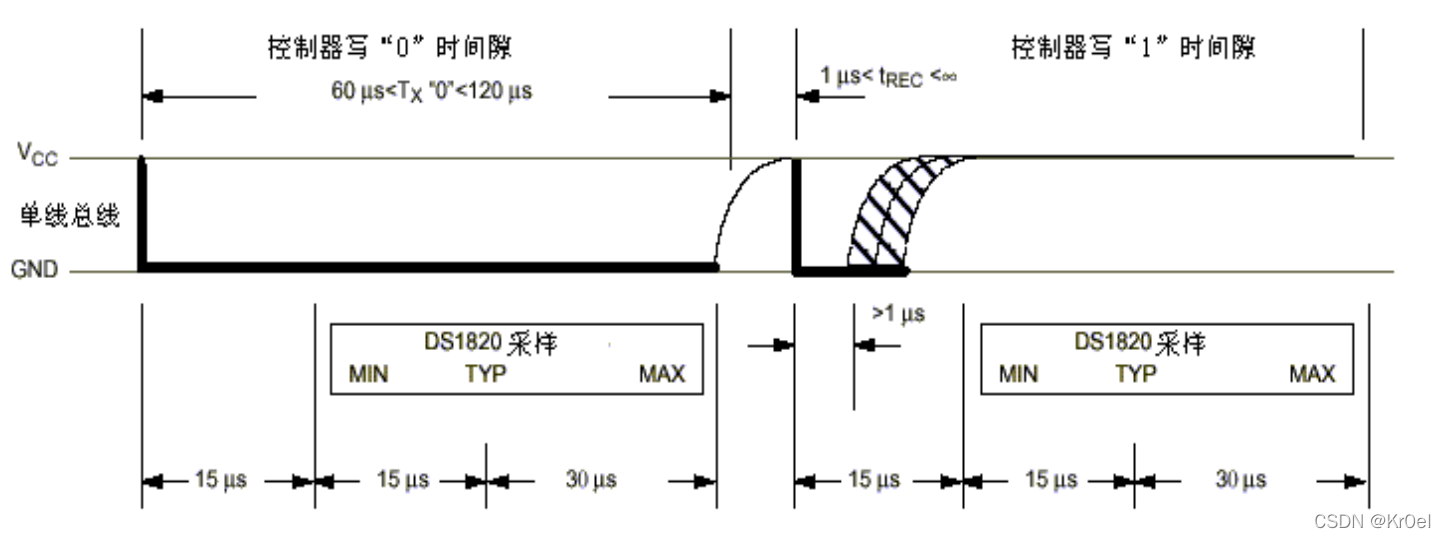
先拉低,保持15us后DS18B20开始采集,此时若为低电平则DS18B20得到0,高电平则为1,总时长至少保持60us(从拉低到采集完)
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}读时序:
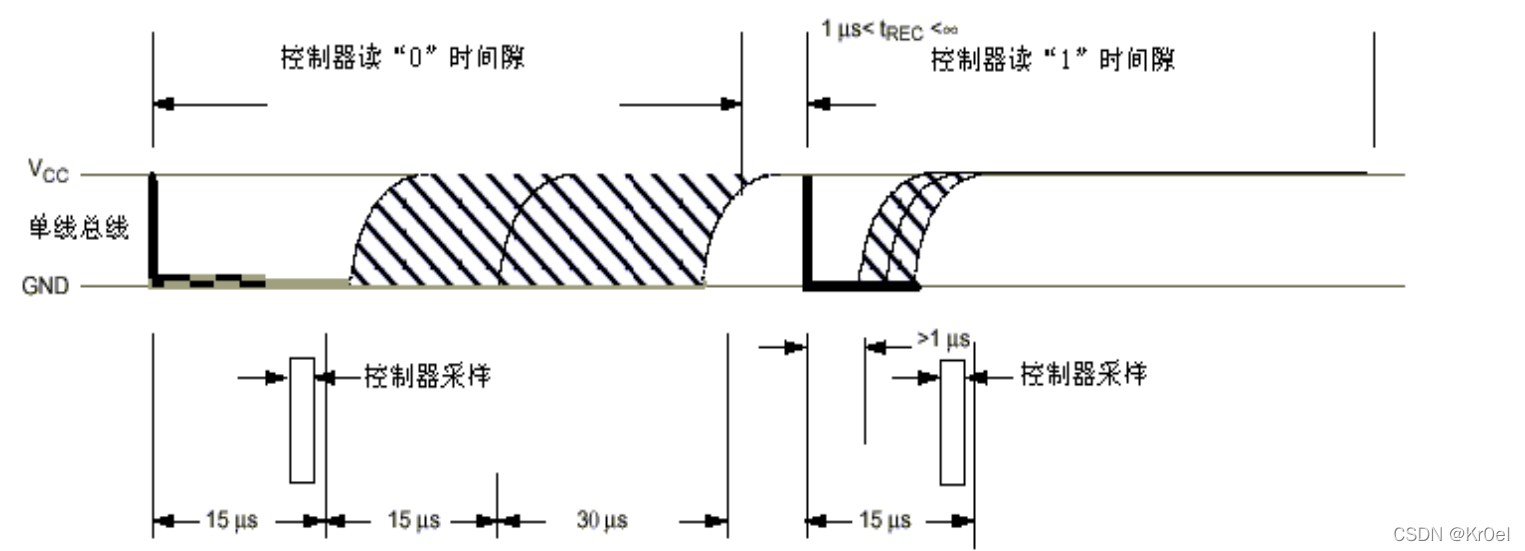
先拉低,采样后拉高,然后根据DS18B20自身为0或1来读0或1
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}整理读到的数据:
低八位的后四位是小数点,高八位的前四位是正负表示,不需要的话需要清除
temp=high<<4;
temp=temp|(low>>4);如果需要读小数点的话:
temp=high&0x0f;//不显示正负
temp<<=8;
temp=temp|low;
temp=temp*625;//精度为0.0625最后整体代码
#include <STC15F2K60S2.H>
#include<intrins.h>
#define u8 unsigned char
#define u16 unsigned int
u8 yi,er,san,si,wu,liu,qi,ba;
u8 tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XFF};
sbit DQ=P1^4;
u8 num,temper,tt;
void Allinit(void);
void DS18B20_WriteByte(u8 dat);
u8 TemperGet();
void Init_DS18B20(void);
void Delay500us(void);
void Delay80us();
void Delay100us(void);
u8 DS18B20_ReadByte();
void Display1(u8 yi,u8 er);
void Display2(u8 san,u8 si);
void Display3(u8 wu,u8 liu);
void Display4(u8 qi,u8 ba);
void Delay(u8 ms);
void main()
{
yi=10;er=10;san=10;si=10;wu=10;liu=10;qi=10;ba=10;
Allinit();
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
while(1)
{
if(++tt==120)//隔一段时间进行显示
{
tt=0;
temper=TemperGet();
yi=temper/10;er=temper%10;
}
Display1(yi,er);
Display2(san,si);
Display3(wu,liu);
Display4(qi,ba);
}
}
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}
u8 TemperGet()//开始工作
{
u8 low,high,temp;
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
Delay500us();
Init_DS18B20();
DS18B20_WriteByte(0XCC);//进行下一个流程
DS18B20_WriteByte(0XBE);
low=DS18B20_ReadByte();
high=DS18B20_ReadByte();
temp=high<<4;
temp=temp|(low>>4);
return temp;
}
void Allinit(void)
{
P2=0X80;P0=0XFF;//LED灯
P2=0XA0;P0=0X00;//蜂鸣器,继电器
P2=0XC0;P0=0XFF;//数码管位选
P2=0XE0;P0=0XFF;//数码管全关闭
}
void Delatems(int ms)
{
int i,j;
for(i=0;i<ms;i++)
for(j=0;j<845;j++);
}
void Delay500us(void) //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 6;
j = 93;
do
{
while (--j);
} while (--i);
}
void Delay80us() //@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 218;
while (--i);
}
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}
void Display1(u8 yi,u8 er)
{
P2=0XC0;
P0=0X01;
P2=0XE0;
P0=tab[yi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X02;
P2=0XE0;
P0=tab[er];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display2(u8 san,u8 si)
{
P2=0XC0;
P0=0X04;
P2=0XE0;
P0=tab[san];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X08;
P2=0XE0;
P0=tab[si];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display3(u8 wu,u8 liu)
{
P2=0XC0;
P0=0X10;
P2=0XE0;
P0=tab[wu];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X20;
P2=0XE0;
P0=tab[liu];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display4(u8 qi,u8 ba)
{
P2=0XC0;
P0=0X40;
P2=0XE0;
P0=tab[qi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X80;
P2=0XE0;
P0=tab[ba];
Delay(100);
P0=0XFF;
Delay(150);
}
void Delay(u8 ms) //1毫秒@11.0592MHz
{
u8 i;
for(i=0;i<ms;i++)
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
}
智能推荐
python opencv resize函数_python opencv 等比例调整(缩放)图片分辨率大小代码 cv2.resize()...-程序员宅基地
文章浏览阅读1.3k次。# -*- coding: utf-8 -*-"""@File : 200113_等比例调整图像分辨率大小.py@Time : 2020/1/13 13:38@Author : Dontla@Email : [email protected]@Software: PyCharm"""import cv2def img_resize(image):height, width = image...._opencv小图等比例缩放
【OFDM、OOK、PPM、QAM的BER仿真】绘制不同调制方案的误码率曲线研究(Matlab代码实现)-程序员宅基地
文章浏览阅读42次。对于这些调制技术的误码率(BER)研究是非常重要的,因为它们可以帮助我们了解在不同信道条件下系统的性能表现。通过以上步骤,您可以进行OFDM、OOK、PPM和QAM的误码率仿真研究,并绘制它们的误码率曲线,以便更好地了解它们在不同信道条件下的性能特点。针对这些调制技术的BER研究是非常重要的,可以帮助我们更好地了解这些技术在不同信道条件下的性能表现,从而指导系统设计和优化。6. 分析结果:根据误码率曲线的比较,分析每种调制方案在不同信噪比条件下的性能,包括其容忍的信道条件和适用的应用场景。_ber仿真
【已解决】Vue的Element框架,日期组件(el-date-picker)的@change事件,不会触发。_el-date-picker @change不触发-程序员宅基地
文章浏览阅读2.5w次,点赞3次,收藏3次。1、场景照抄官方的实例,绑定了 myData.Age 这个值。实际选择某个日期后,从 vuetool(开发工具)看,值已经更新了,但视图未更新。2、尝试绑定另一个值: myData,可以正常的触发 @change 方法。可能是:值绑定到子对象时,组件没有侦测到。3、解决使用 @blur 代替 @change 方法。再判断下 “值有没有更新” 即可。如有更好的方法,欢迎评论!..._el-date-picker @change不触发
PCL学习:滤波—Projectlnliers投影滤波_projectinliers-程序员宅基地
文章浏览阅读1.5k次,点赞2次,收藏8次。Projectlnliersclass pcl: : Projectlnliers< PointT >类 Projectlnliers 使用一个模型和一组的内点的索引,将内点投影到模型形成新的一个独立点云。关键成员函数 void setModelType(int model) 通过用户给定的参数设置使用的模型类型 ,参数 Model 为模型类型(见 mo..._projectinliers
未处理System.BadImageFormatException”类型的未经处理的异常在 xxxxxxx.exe 中发生_“system.badimageformatexception”类型的未经处理的异常在 未知模块。 -程序员宅基地
文章浏览阅读2.4k次。“System.BadImageFormatException”类型的未经处理的异常在 xxxx.exe 中发生其他信息: 未能加载文件或程序集“xxxxxxx, Version=xxxxxx,xxxxxxx”或它的某一个依赖项。试图加载格式不正确的程序。此原因是由于 ” 目标程序的目标平台与 依赖项的目标编译平台不一致导致,把所有的项目都修改到同一目标平台下(X86、X64或AnyCPU)进行编译,一般即可解决问题“。若果以上方式不能解决,可采用如下方式:右键选择配置管理器,在这里修改平台。_“system.badimageformatexception”类型的未经处理的异常在 未知模块。 中发生
PC移植安卓---2018/04/26_电脑软件移植安卓-程序员宅基地
文章浏览阅读2.4k次。记录一下碰到的问题:1.Assetbundle加载问题: 原PC打包后的AssetBundle导入安卓工程后,加载会出问题。同时工程打包APK时,StreamingAssets中不能有中文。解决方案: (1).加入PinYinConvert类,用于将中文转换为拼音(多音字可能会出错,例如空调转换为KongDiao||阿拉伯数字不支持,如Ⅰ、Ⅱ、Ⅲ、Ⅳ(IIII)、Ⅴ、Ⅵ、Ⅶ、Ⅷ、Ⅸ、Ⅹ..._电脑软件移植安卓
随便推点
聊聊线程之run方法_start 是同步还是异步-程序员宅基地
文章浏览阅读2.4k次。话不多说参考书籍 汪文君补充知识:start是异步,run是同步,start的执行会经过JNI方法然后被任务执行调度器告知给系统内核分配时间片进行创建线程并执行,而直接调用run不经过本地方法就是普通对象执行实例方法。什么是线程?1.现在几乎百分之百的操作系统都支持多任务的执行,对计算机来说每一个人物就是一个进程(Process),在每一个进程内部至少要有一个线程实在运行中,有时线..._start 是同步还是异步
制作非缘勿扰页面特效----JQuery_单击标题“非缘勿扰”,<dd>元素中有id属性的<span>的文本(主演、导演、标签、剧情-程序员宅基地
文章浏览阅读5.3k次,点赞9次,收藏34次。我主要用了层次选择器和属性选择器可以随意选择,方便简单为主大体CSS格式 大家自行构造网页主体<body> <div class='main' > <div class='left'> <img src="images/pic.gif" /> <br/><br/> <img src="images/col.gif" alt="收藏本片"/&_单击标题“非缘勿扰”,元素中有id属性的的文本(主演、导演、标签、剧情
【Python】No module named ‘win32com‘,最简单的解决方法,适用windows、mac、linux_no module named 'win32com-程序员宅基地
文章浏览阅读2.2k次。完整的解决思路_no module named 'win32com
有了这6款浏览器插件,浏览器居然“活了”?!媳妇儿直呼“大开眼界”_浏览器插件助手-程序员宅基地
文章浏览阅读901次,点赞20次,收藏23次。浏览器是每台电脑的必装软件,去浏览器搜索资源和信息已经成为我们的日常,我媳妇儿原本也以为浏览器就是上网冲浪而已,哪有那么强大,但经过我的演示之后她惊呆了,直接给我竖起大拇指道:“原来浏览器还能这么用?大开眼界!今天来给大家介绍几款实用的浏览器插件,学会之后让你的浏览器“活过来”!_浏览器插件助手
NumPy科学数学库_数学中常用的环境有numpy-程序员宅基地
文章浏览阅读101次。NumPy是Python中最常用的科学数学计算库之一,它提供了高效的多维数组对象以及对这些数组进行操作的函数NumPy的核心是ndarray(N-dimensional array)对象,它是一个用于存储同类型数据的多维数组Numpy通常与SciPy(Scientific Python)和 Matplotlib(绘图库)一起使用,用于替代MatLabSciPy是一个开源的Python算法库和数学工具包;Matplotlib是Python语言及其Numpy的可视化操作界面'''_数学中常用的环境有numpy
dind(docker in docker)学习-程序员宅基地
文章浏览阅读1.1w次。docker in docker说白了,就是在docker容器内启动一个docker daemon,对外提供服务。优点在于:镜像和容器都在一个隔离的环境,保持操作者的干净环境。想到了再补充 :)一:低版本启动及访问启动1.12.6-dinddocker run --privileged -d --name mydocker docker:1.12.6-dind在其他容器访问d..._dind