视觉AI:它是什么,为什么它很重要?-程序员宅基地
技术标签: 大数据ai人工智能it计算机科普 机器学习 计算机视觉 人工智能 ai 大数据

视觉AI(也称为计算机视觉)是计算机科学的一个领域,它训练计算机复制人类视觉系统。这使得数字设备(如人脸检测器,QR码扫描仪)能够像人类一样识别和处理图像和视频中的物体。
电子商务商店的个性化图像搜索,3D模型构建(摄影测量),地图上的aeriel图像,零售店的OCR扫描,人脸识别,图像探测器,MRI重建是我们今天拥有的计算机视觉的一些创新用例。
但是,这项技术是什么时候引入的呢?它是如何演变的?无论行业如何,它都会为企业带来哪些未来的可能性?接下来的部分将讨论这三个因素,并简要介绍视觉AI的工作原理。那么,让我们开始吧。
计算机视觉的历史与演进:
计算机视觉的第一个实验发生在20世纪50年代,其中神经网络用于检测物体的边缘并对正方形和圆形等简单物体进行排序。在20世纪70年代后期,计算机视觉的商业用例被实施。它是使用光学字符识别(OCR)的手写文本的解释。这种执行是用来解释盲人的书面文本。在1999年代,随着互联网的成熟,面部识别程序蓬勃发展。后来,在2010年(及以后),深度学习帮助计算机训练自己并随着时间的推移自我完善。
如今,这项技术已经在汽车、医疗保健、零售、智能手机等各个领域找到了自己的用例。促进视觉AI技术进步的是经济实惠的计算能力,更好的硬件,卷积神经网络等新算法。因此,输出的准确性更高,并且改进了该技术的用例。
由于其潜力,到2019年底,计算机视觉AI市场预计将达到16亿美元。|资料来源:国家统计局
计算机视觉AI:它是如何工作的?
将计算机视觉AI视为拼图游戏。您必须组装几个部分才能创建映像。这正是计算机视觉神经网络的工作原理。神经网络区分图像的不同部分并识别子组件的模型。
计算机不是给出识别物体的提示,而是提供可以帮助精确识别物体的图像。假设,你必须训练一台计算机来识别一只猫。该系统没有给出不同的尾巴,胡须,尖尖的耳朵等提示,而是用数百(或数百万)的猫的图像喂养。这样创建的模型了解构成猫的不同特征,或将其与其他外观相似的动物区分开来。
计算机视觉AI的应用:
1. 图像分割
它是根据图像中的像素特征将图像从多个区域和片段中划分的过程。图像分割通常用于检查目的,涉及根据颜色或形状的相似性,按像素将前景与背景分开或按像素聚类图像的各个部分。下面显示的图像举例说明了图像分割,其中图像的某些部分通过颜色进行区分。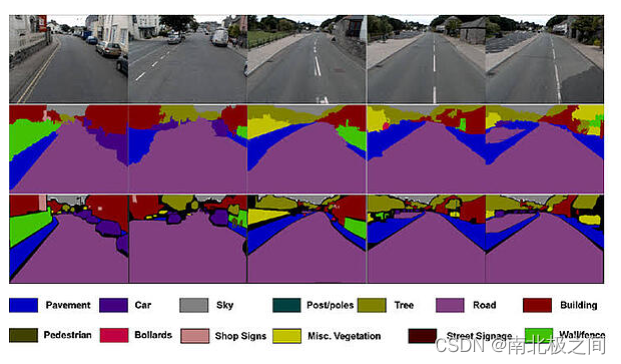
图片提供:研究门
2. 物体检测
计算机视觉AI的这个领域处理图像或视频中一个或多个对象的检测。例如,监控摄像头可以智能地检测人类及其活动(无运动,枪支或刀等物体等),以便对可疑活动进行警告。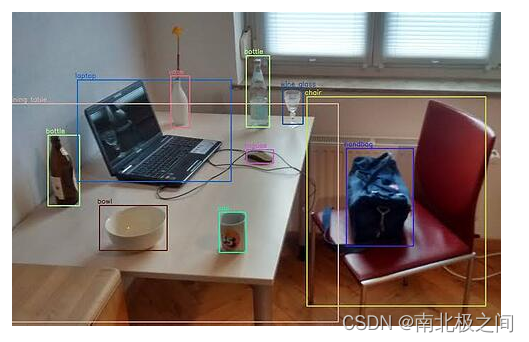
图片提供:研究门
3. 面部识别
面部识别技术旨在检测图像中的物体或人脸。它是计算机视觉的复杂应用之一,因为人脸的表情,姿势,肤色,相机质量,位置或方向,图像分辨率等的差异各不相同。但是,这种技术被突出使用。智能手机使用它进行用户身份验证。Facebook在为图片中的人物提供标记建议时也使用相同的技术。

图片提供:苹果
4. 边缘检测
边缘检测处理查找图像中对象的边界。这是通过检测亮度的不连续性来完成的。边缘检测可以极大地帮助数据提取和图像分割。

图片提供:维基百科
5. 模式识别
模式识别是系统检测特征或数据排列的能力。在这里,模式可以是重复的数据序列或添加到系统中的一组数据。

图片提供:维基百科
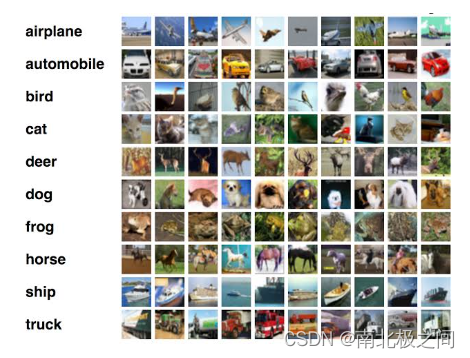
6. 图像分类
图像分类涉及根据图像中存在的上下文视觉内容对图像进行分类。该过程包括将重点放在附近像素的关系上。分类系统包括一个包含预定义模式的数据库。将这些模式与检测到的对象进行比较,以对其进行分类。图像分类在车辆导航、生物测量、视频监控、生物医学成像等领域具有重要的应用。
计算机视觉的现状和未来:
计算机视觉为消费者和企业带来了无限的可能性。自动驾驶汽车、医疗诊断、图像标签、无收银员结账是计算机视觉技术的一些好处,这些好处体现了其对不同行业的无限好处。
然而,在更大规模上实现计算机视觉的主要挑战之一是需要训练的大数据。有了更好的资源来训练模型,计算机视觉就能够绕过人类识别、分类和检测各种图像/视频的能力。
智能推荐
zabbix 讲解_zabbix数据存储在哪-程序员宅基地
文章浏览阅读2k次,点赞4次,收藏7次。一、监控知识基本概述1.为什么要使用监控1.对系统不间断实时监控2.实时反馈系统当前状态3.保证服务可靠性安全性4.保证业务持续稳定运行2.如何进行监控,比如我们需要监控磁盘的使用率1.如何查看磁盘使用率 df -h2.监控磁盘的那些指标 block、 inode3.获取的数值到达多少报警 80%3.流行的监控工具1.Zabbix2.Lepus(天兔)数据库监控系统3.Open-Falcon 小米4.Prometheus(普罗米修斯, Docker、 K8s)4._zabbix数据存储在哪
【知识分享】9M高精度三维扫描仪|是它,让注塑模具检测精准快捷-程序员宅基地
文章浏览阅读80次,点赞2次,收藏2次。XTOM-MATRIX-9M三维扫描仪,通过双向两次多频相移编码光栅投射在物体表面,四目工业相机双幅面自由切换采集数据,可以测量各种注塑件、注塑模具外形,测量过程可对工件翻转和移动,对注塑产品进行多角度测量,在采集注塑产品表面三维数据的同时,迅速获取纹理信息,得到3D数据模型。XTOM-9M四目高精度三维扫描仪,可应用于注塑产业生产链中的注塑件检测、注塑模具检测环节中,通过全尺寸的三维扫描数据,将产品的质量缺陷可视化呈现,从而提升注塑成型过程和注塑产品的检测效率。
Python-入门_python中:>#11x-程序员宅基地
文章浏览阅读203次。python黑马程序员网课笔记_python中:>#11x
T113开发板优化启动速度方法_全志t113linxu开机速度-程序员宅基地
文章浏览阅读220次。具体修改device/config/chips/t113/configs/evb1_auto/longan/env.cfg 配置文件,新增一行"verify=no"。文件为:device/config/chips/t113/configs/evb1_auto/longan/env.cfg。文件为device/config/chips/t113/configs/evb1_auto/longan/env.cfg,1、把启动脚本放在/etc/init.d/rcS文件的最前面执行。3、去掉uboot部分打印。_全志t113linxu开机速度
SQLServer自学之路3 数据库的备份、还原、分离和附加_实验三分离与附加还原备份-程序员宅基地
文章浏览阅读2k次。数据库备份:界面操作点击添加->选择目录写入备份文件名称->点击确认 添加成功 删除原来不用的地址或选择新的地址就可以了备份成功!数据库还原:界面操作按照自学之路2的方法删除数据库,然后进行还原进入还原数据库->点击设备->点击…->进入选择备份设备->点击添加->选择所以文件,选择备份文件,点击确认->点击选择备份设备里面的文件,点击确定->回到还原数据库页面,点击确认->完成还原数据库分离:界面操作点击确认后 数据库_实验三分离与附加还原备份
在Linux上创建基于ISO镜像的本地Yum仓库_linux iso yum-程序员宅基地
文章浏览阅读459次。许多情况下,我们需要在本地环境中创建基于ISO镜像文件的Yum软件仓库,以方便本地机器安装软件包而无需访问外部网络。本文将介绍如何简单快速地在Linux系统上创建和使用基于ISO镜像的本地Yum仓库。_linux iso yum
随便推点
记录一次莫名其妙的错误 ModuleNotFoundError: No module named ‘pyecharts. charts‘ ; ‘pyecharts‘ is not a package_pyecharts.charts为什么在vscode无法找到-程序员宅基地
文章浏览阅读2k次。今天在安装python的pyecharts库的遇到了奇怪的问题。ModuleNotFoundError: No module named ‘pyecharts. charts’ ; ‘pyecharts’ is not a package但是,我进入site-packages又看见的的确确是有这个模块的百度了不少,换过两个版本,尝试了各种花式安装方法,借过同学的pyecharts库,最后尝试了重启,还是没能解决。最后感觉不会是版本问题,还是选择卸载了其他版本,选择了最新的版本pip unins_pyecharts.charts为什么在vscode无法找到
Mac系统python socket报错socket.gaierror: [Errno 8] nodename nor servname provided, or not known-程序员宅基地
文章浏览阅读7.9k次。报错内容Traceback (most recent call last): File "server.py", line 19, in <module> serversocket.bind((host, port))socket.gaierror: [Errno 8] nodename nor servname provided, or not known解决方式..._[errno 8] nodename nor servname provided, or not known
连接-程序员宅基地
文章浏览阅读55次。http://v.youku.com/v_show/id_XNTg1ODUzNjg=.htmlhttp://blog.csdn.net/w809026418/archive/2008/12/05/3455610.aspx...
error C2440: “static_cast”: 无法从“UINT (__thiscall CXXX::* )(CPoint)”转换为“LRESULT (__thiscall CWnd::* )-程序员宅基地
文章浏览阅读2.2k次。发现CXXX是一个很好的实现VC界面的类,下来编译出现如下错误:错误 1 error C2440: “static_cast”: 无法从“UINT (__thiscall CXXX::* )(CPoint)”转换为“LRESULT (__thiscall CWnd::* )(CPoint)”解决:查看CWnd类afx_msg LRESULT OnNcHitTest(CPoint poi_error c2440: “static_cast”: 无法从“uint (__thiscall cscope::* )(cpoint)”
实对称矩阵一定可以对角化_实对称矩阵一定可以对角化证明-程序员宅基地
文章浏览阅读3.2w次,点赞25次,收藏74次。UTF8gbsn实对称矩阵一定可以对角化.最近看共轭梯度下降的时候看到有人的推导里面用到了这个命题. 虽然以前学过,但是学得很渣, 所以没有自己想过这个命题怎么样成立的.现在将这些证明过程梳理一下.实对称矩阵含有n个实根首先我们来证明一个命题, 实对称矩阵含有n个实根,注意,n个实根并不一定都是不同的, 可能含有重根.比如(r−1)2=0(r-1)^2=0(r−1)2=0就含有两个重根r=1r=1r=1.在计算根数目的时候这个方程的解算两个.首先, 任意的矩阵A\mathbf{A}A,_实对称矩阵一定可以对角化证明
java 将字节数转换为秒-程序员宅基地
文章浏览阅读359次,点赞8次,收藏6次。字节数转换为秒