几种智能机器人室内定位方法对比_智能定位算法-程序员宅基地
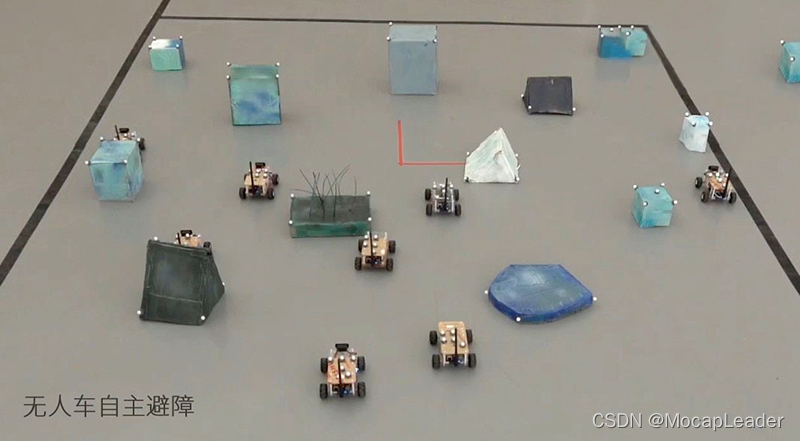
近年来随着控制算法的研究进展,无人机、无人车等智能机器人在各领域中发展迅速。研发人员在对智能机器人进行相关研究时,通常需要完成室内环境下的模拟调试实验,在这些实验中,确定各智能体自身定位以及与其他智能体的相对位置,即进行精确定位,是十分重要的。
室内定位算法原理
目前的定位算法从原理上来说,大体上可以分为以下三种。
一、邻近信息法:利用信号作用的有限范围,来确定待测点是否在某个参考点的附近,这一方法只能提供大概的定位信息
二、场景分析法:测量接收信号的强度,与实现测量的、存在数据库的该位置的信号强度作对比。
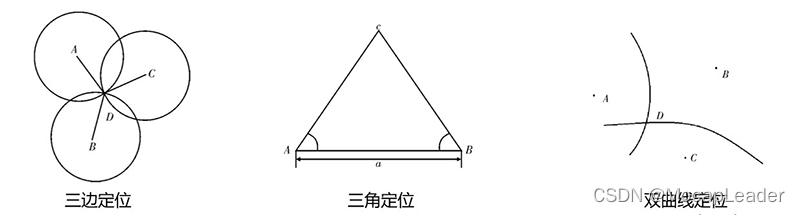
三、几何特征法:利用几何原理进行定位的算法,具体又分为三边定位法、三角定位法以及双曲线定位法。
根据上面介绍的定位算法,衍生出了多种室内定位技术。目前的定位技术多要借助辅助节点进行定位,通过不同的测距方式计算出待测节点相对于辅助节点的位置,然后与数据库中事先收集的数据进行比对,从而确定当前位置。
室内定位主要流程为首先在室内环境设置固定位置的辅助节点,这些节点的位置已知,有的位置信息是直接存在节点中,如射频识别(RFID)的标签,有的是存在电脑终端的数据库中,如红外线、超声波等。
然后测量待测节点到辅助节点的距离,从而确定相对位置,使用某种方式进行测距通常需要一对发射和接收设备,按照发射机和接收机的位置大体可以分为两种:一种是发射机位于被测节点,接收机位于辅助节点,例如红外线,超声波和射频识别(RFID);另一种是发射机位于辅助节点,接收机位于被测节点,例如 WiFi、超宽带(UWB)、ZigBee。
室内定位技术对比
下面具体介绍八种室内定位技术所涉及原理与优缺点。
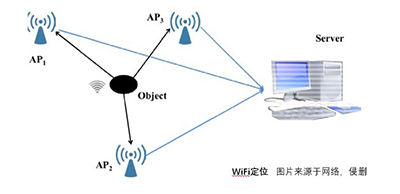
一、WiFi定位技术,定位方法是场景分析法,其定位精度由于覆盖范围的不同,可以达到2-50m。优点是易安装、系统总精度相对较高,缺点是指纹信息收集量大、易受其他信号干扰。
二、视频识别(RFID)技术,定位方法是临近信息法,其定位精度在5cm-5m之间。这一方法的优点是精度较高、造价低、标识体积小,缺点是定位距离短、不便于整合。
三、ZigBee定位技术,定位方法是临近信息法,定位精度在1-2m。优点是低功耗、低成本,缺点是稳定性低、受环境干扰。

四、红外线定位技术,定位方法是临近信息法,定位精度在5-10m。优点是定位精度较高,缺点是造价高、功耗大、受灯光影响。
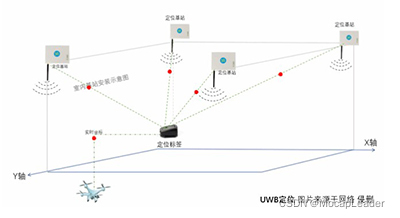
五、超宽带定位(UWB),定位方法是三边定位法,定位精度在6-10cm,优点是穿透性强、精度较高、功耗低,缺点是造价比较高。
六、超声波定位技术,定位方法是三边定位法,定位精度在1-10cm。优点是精度较高、结构简单,缺点是多径效应、受环境温度影响、信号衰减明显。
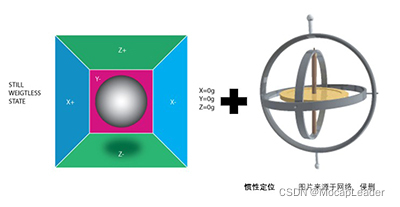
七、惯性定位法,是利用惯性传感器采集到的运动数据,如加速度传感器、陀螺仪等测量物体运动速度、方向、加速度等信息,通过积分定位方法或者基于航位推测法,经过运算后得到物体的位置信息。其优点是不依赖外界环境,缺点是随着行走时间的增加,惯性导航定位存在累计误差,所以一般是与其他传感器数据融合使用。
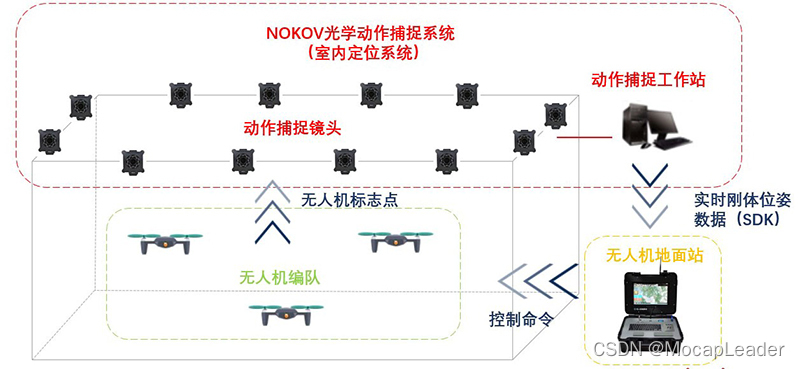
八、NOKOV度量室内定位技术,主要用于实时准确测量,记录物体在真实三维空间中的运动轨迹或姿态。其光学式动作捕捉系统利用多个高速相机,从不同角度监视和跟踪待捕捉目标上的标志点,根据计算机视觉原理,可以从多个高速摄像机的连续图像序列里,确定某个点在空间中的位置和运动轨迹,获取得到的实时刚体位姿数据通过SDK发送到无人机地面站,地面站输出控制命令进一步控制无人机的运动。考虑到不同的实际情况,动作捕捉工作站也可以将实时刚体位姿数据通过SDK,发送到无人机的控制芯片,利用无人机进行解算数据,实现自主协同控制。

通过对比可以发现,在所有室内定位技术中,精度排在首位的当属动作捕捉技术,其测量精度高达亚毫米级。NOKOV度量动作捕捉系统可以获取目标物的位置、姿态以及速度、加速度等信息,具备技术成熟度高、精度高、采样频率高等优点,适用于有高精度定位需求的研究。
NOKOV度量动作捕捉数据作为真值用于算法验证
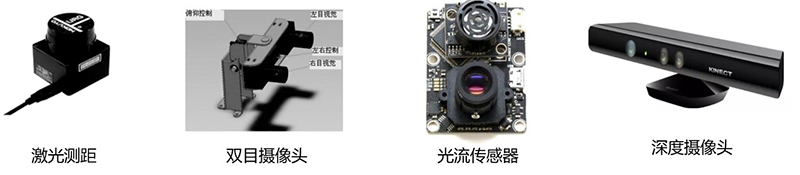
对于一些自主导航无人机,如利用激光雷达、双目摄像头、深度摄像头、光流传感器等机载传感器作为定位避障的方案,NOKOV度量动作捕捉系统获取的数据不参与飞行控制,只提供高精度参考标准位置信息用于分析结果。
例如在同济大学建筑与城市规划学院开发的无人机集群自主建造系统中,就使用了NOKOV度量动作捕捉系统。建造系统整体由无人机空间位姿反馈和地面站轨迹规划控制两部分组成,系统定位需求分为两个部分:位姿控制和全局定位控制。尽管NOKOV度量动作捕捉系统可以对室内刚体进行姿态的解算,且解算精度比机载惯性测量单元好,但由于系统内置的惯性测量单元足以支撑刚体的姿态估计,所以在位姿控制部分,使用的是无人机控制领域常用的解决方案,即利用机载的姿态传感器、磁力计、气压计和空速计等传感器系统综合处理无人机实时的局部姿态信息。系统的全局定位控制采用了基于光学红外相机的NOKOV度量动作捕捉系统,代替室外常用的GPS定位系统对无人机的实时位置进行跟踪,以满足室内无人机稳定悬停的作业要求,同时将无人机坐标信息传回地面站计算机的可视化界面。
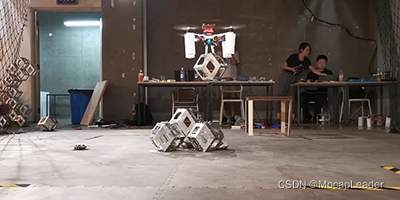
这种基于NOKOV度量动作捕捉系统的无人机自主建造实时控制系统和可视化界面平台,验证了无人机用于离散化结构建造的能力,同时利用空间镶嵌原则提出了无人机砌筑的整体结构形式和离散单元体形式,这一系列成果都为空中集群智能体自主建造提供了进一步的研究思路和方法。
智能推荐
超叼的一套知识要点,6位阿里大师共同编写的高可用分布式架构设计核心_robertleepeak-程序员宅基地
文章浏览阅读127次。开篇吹水从传统互联网到移动互联网再到物联网,中国乃至全球的互联网技术在近十年得到了高速发展。作为架构师,我们非常乐意把这些技术传播出去,让更多的人享受互联网技术的红利,让技术拓展商业的边界。阿里巴巴的双11技术已经越来越成熟,因为阿里巴巴已经逐步具备了基于云的计算能力,可以轻松应对各种业务压力。本书的上册《分布式服务架构:原理、设计与实战》详细介绍了如何解决线上高并发服务的一一致性、高性能、高可用、敏捷等痛点。本书延续了高可用服务架构的主题,侧重于讲解高可用架构设计的核心要点:可伸缩和可扩展,从应_robertleepeak
Clion如何创建规范化的代码注释?_cloin的注释怎么改为/*-程序员宅基地
文章浏览阅读447次,点赞8次,收藏9次。Clion如何创建规范化的代码注释?自动化,规范化?_cloin的注释怎么改为/*
二级菜单原生js实现_原生一级二级菜单-程序员宅基地
文章浏览阅读1.8k次。今天莫名其妙想用原生js实现二级菜单,之前用jquery感觉挺简单的,但是jquery好久没用了,试着用原生的js实现一下。首先用nodeName判断子节点为li元素,然后就有二种实现方式1.item.style.display用none和block进行菜单伸缩这种方式挺常见的,但是一开始判断display的值要考虑多一些,因为这种方式加css是直接加到标签上的。代码如下<!DOCTYPE html><html><head><..._原生一级二级菜单
[西柚仔]Gateway网关(二)路由、 断言、 过滤 +实战(源码)_什么是断言 路由 过滤器-程序员宅基地
文章浏览阅读347次。Gateway网关(二)路由、 断言、 过滤 +实战(源码)前言今天给大家讲解一下Gateway三大核心:Route(路由)、Predicate(断言)和Filter(过滤),然后给大家演示代码实操。Route(路由):路由是构建网关的基本模块,它由ID,目标URL,一系列的断言和过滤器组成,如断言为true则匹配路由。Predicate(断言):断言是JDK8的新特性,可以参考java.util.function.Predicate。断言是编程术语,表示为一些布尔表达式,程序员相信在程序中的某个特_什么是断言 路由 过滤器
手机号正则匹配规则_23、使用正则完成市面上手机规则的编写、随机生成11位数然后通过正则匹配出符合规-程序员宅基地
文章浏览阅读557次。$isMob = "/^1[3-9]\d{9}$/";_23、使用正则完成市面上手机规则的编写、随机生成11位数然后通过正则匹配出符合规
blender中文三维立体文字制作方法_blender怎么做立体字-程序员宅基地
文章浏览阅读2w次。启动blender后使用左侧工具栏;“Create”创建 → “Text”文本 ;选中刚刚创建的text,点击键盘tab键,或者调整到编辑模式,或者在对象目录树中选中刚刚创建的text对象;这时候变为可编辑状态,英文字母或者数字可以直接输入,输入后左下角会出现insert text的对话面板;中文无法在blender中直接输入,所以要打开一个记事本,输入中文,然后复制中文,..._blender怎么做立体字
随便推点
labview求n阶乘的和_labview常见习题大全-程序员宅基地
文章浏览阅读1.2k次。y2=m*x+bx的范围是0---10。y1和y2用数组显示件显示在前面板。6.10.26编程求Josephus(约瑟夫环)问题:m个小孩子围成一圈,从第一个小孩子开始顺时针方向数数字,到第n个小孩子离开,这样反反复复,最终只剩下一个小孩子,求第几个小孩子留下?7.10.27猴子吃桃子问题,每天吃完全部的桃子一半又一个,到第10天的时候还剩下一个,编程求第一天桃子的总数.8.10.28编程求100..._labviewn的阶乘求和
kubernetes-12 访问控制ServiceAccount、UserAccount、RBAC和服务账户的自动化_kubernetes查看有多少用户-程序员宅基地
文章浏览阅读353次。1 .kubernetes API 访问控制访问控制流程如下: 认证、授权和准入控制。具体流程如下:Authentication(认证)认证方式现共有8种,可以启用一种或多种认证方式,只要有一种认证方式通过,就不再进行其它方式的认证。通常启用X509 Client Certs和Service Accout Tokens两种认证方式。Kubernetes集群有两类用户:由Kubernetes管理的Service Accounts (服务账户)和(Users Accounts) 普通账户。_kubernetes查看有多少用户
第 2 章 ROS通信机制_通信机制实操与比较(自学二刷笔记)-程序员宅基地
文章浏览阅读1.1k次,点赞45次,收藏16次。三种通信机制中,参数服务器是一种数据共享机制,可以在不同的节点之间共享数据,话题通信与服务通信是在不同的节点之间传递数据的,三者是ROS中最基础也是应用最为广泛的通信机制。不同通信机制有一定的互补性,都有各自适应的应用场景。尤其是话题与服务通信,需要结合具体的应用场景与二者的差异,选择合适的通信机制。修改turtlesim乌龟显示节点窗体的背景色,已知背景色是通过参数服务器的方式以 rgb 方式设置的。PS: 注意节点启动顺序,如果先启动乌龟显示节点,后启动背景色设置节点,那么颜色设置不会生效。
解决jQuery删除表格行(tr)失败的问题_jquery 删除表格行-程序员宅基地
文章浏览阅读198次。在使用jQuery删除表格行时,遇到删除失败的情况可能是由于选择器错误、事件绑定问题或行索引错误引起的。事件绑定问题:如果在删除行之前绑定了某些事件(如点击事件),则删除行时可能会导致事件处理程序出现问题。如果尝试通过行索引来删除行,请确保行索引是正确的,并且在表格范围内。选择器错误:在使用jQuery选择器选中要删除的行时,可能会出现选择器错误的情况。行索引错误:如果尝试通过行索引来删除行,可能会出现行索引错误的情况。在上述示例代码中,当点击"删除行"按钮时,会删除表格中的第二行。_jquery 删除表格行
如何将本地项目提交到git服务器中_git 提交一个已有的本地项目到服务器-程序员宅基地
文章浏览阅读693次。1、初始化git git init2、添加要提交的文件 git add 文件名(注:当要把整个项目都提交则用 git add . ,每次文件只要被修改,都要重新在add一次,不然commit只会提交add 暂存区里的内容)3、完成提交 git commit -m "描述"4、将本地git和服务器上的连接(如果已经连接,这一步可以省略) git remote add origin ***.git ,origin是你要提交到的仓库的地址5、将本地项目推..._git 提交一个已有的本地项目到服务器
Postgresql本地语言环境参数设置(LC_COLLATE,LC_CTYPE)-程序员宅基地
文章浏览阅读1.5w次,点赞5次,收藏22次。大家在安装PG的时候,可能会忽略LC_COLLATE,LC_CTYPE参数设置,这里说明一下这两个参数的设置是在初始化数据库的时候设置的,初始化后是无法更改的,所以还是要注意一下。如果你本地系统设置的语言环境就是你想要的,那么这里可以不加该参数,如果不是你需要的,那么这里可以指定为你需要的语言环境设置其他相类似的参数可以更改,如lc_messages,lc_monetary,lc_numeric..._lc_collate