LiDAR-BEVMTN:自动驾驶中的实时激光雷达鸟瞰图多任务感知网络-程序员宅基地
编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【多传感器融合】技术交流群
本文只做学术分享,如有侵权,联系删文
论文链接:https://arxiv.org/pdf/2307.08850.pdf
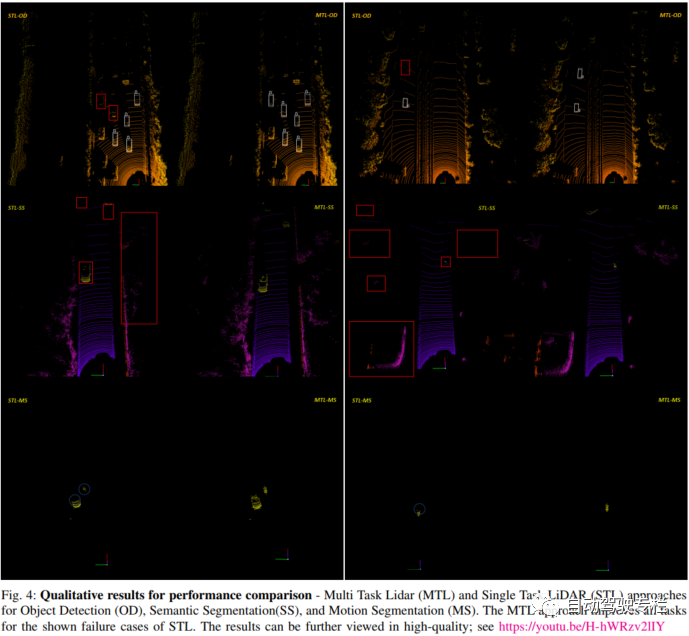
视频链接:https://youtu.be/H-hWRzv2lIY

摘要

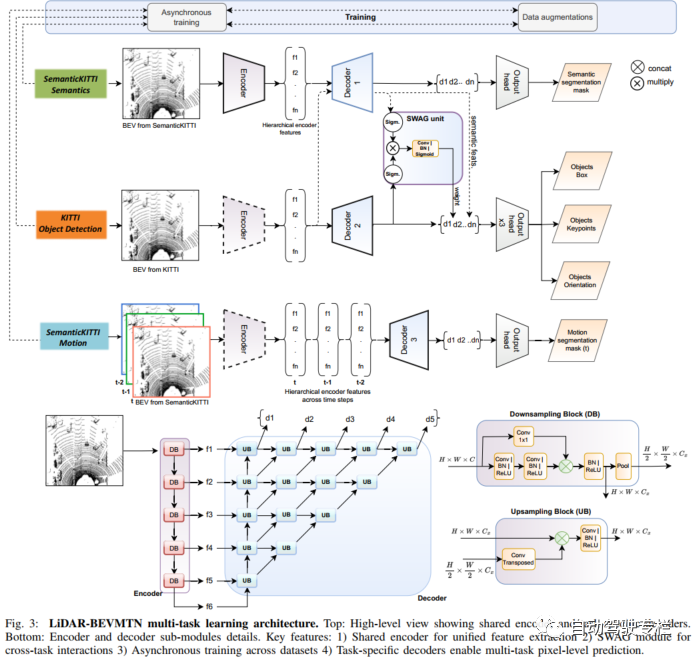
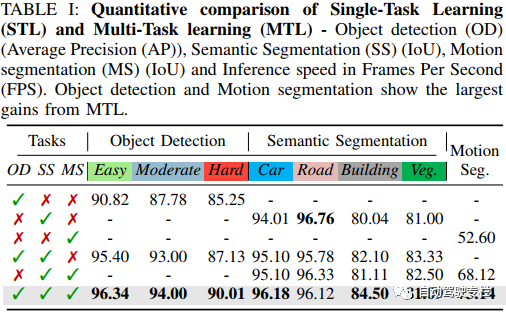
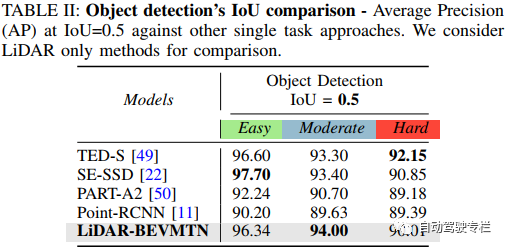
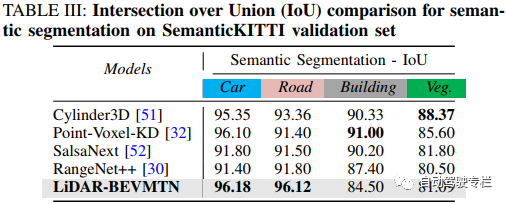
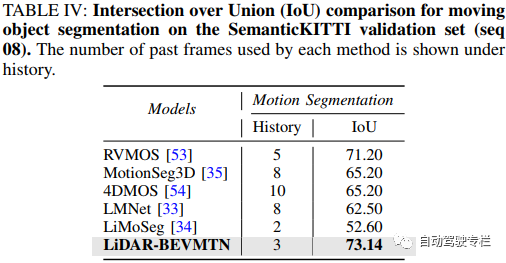
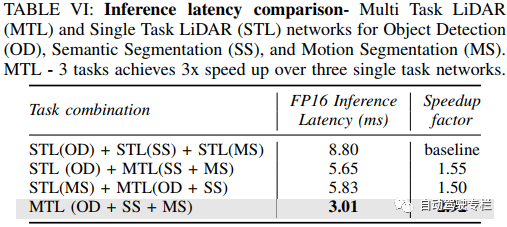
本文介绍了LiDAR-BEVMTN:自动驾驶中的实时激光雷达鸟瞰图多任务感知网络。激光雷达对于自动驾驶中鲁棒的3D场景感知至关重要。激光雷达感知具有仅次于相机感知的最多的文献。然而,使用激光雷达进行检测、分割和运动估计等任务的多任务学习仍然相对未经探索,尤其是在车载级嵌入式平台上。本文提出一种实时的多任务卷积神经网络,用于基于激光雷达的目标检测、语义和运动分割。统一的框架包含共享编码器和任务专用解码器,实现联合表示学习。本文提出一种新型的语义加权和引导(SWAG)模块来选择性地迁移语义特征,以改进目标检测。本文的异构训练策略结合各种数据集,并且利用了任务之间的互补线索。该工作提供了首个嵌入式实现,将这些来自激光雷达点云的感知任务统一起来,在嵌入式NVIDIA Xavier平台上实现3ms延迟。我们在语义和运动分割这两项任务上取得最先进的结果,并且在3D目标检测任务上获得接近最好的性能。通过最大化硬件效率并且利用多任务协同,本文方法提供了一个精确且高效的解决方案,专为现实世界自动驾驶部署量身定制。

主要贡献

本文的主要贡献总结如下:
1)本文提出一种实时多帧扫描的多任务CNN框架,用于从激光雷达点云中进行联合目标检测、语义分割和运动分割;
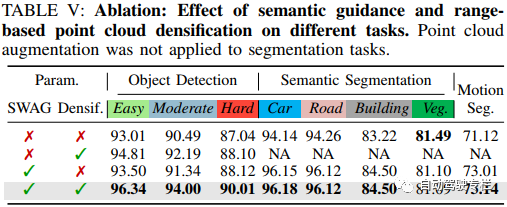
2)本文提出了一种语义加权和引导(SWAG)模块,其选择性地迁移相关语义特征,以提高目标检测精度;
3)本文提出一种异构训练策略,将不同的数据集结合起来,并且利用多任务协同;
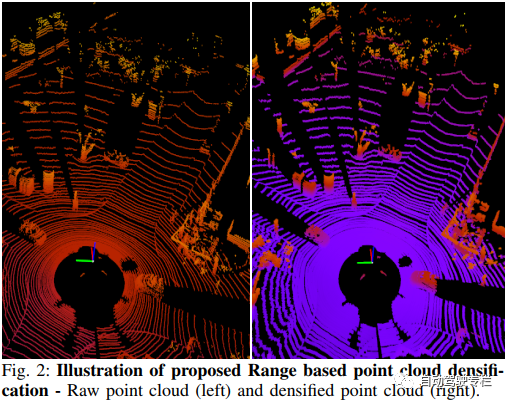
4)本文提出一种简单而有效的基于距离的点云稠密化技术,以丰富目标边界并且改进远距离检测;
5)本文在嵌入式平台NVIDIA Xavier AGX开发套件上进行了大量的消融研究,并且证明了其实时能力。

论文图片和表格


总结

在这项工作中,我们提出了LiDAR-BEVMTN,这是一种用于从激光雷达点云中进行联合目标检测、语义分割和运动分割的多任务神经网络。本文提出的模型在具有挑战性的KITTI和SemanticKITTI数据集上的所有三项任务中均取得最先进的结果。据我们所知,这是首项在KITTI和SemanticKITTI上使用多任务深度学习来共同处理这些特定任务的工作。本文的结果和分析证明了多任务学习在组合3D感知方面的优势。尽管多任务使用连续激光雷达扫描,但是我们在嵌入式车载平台上实现了3ms的低延迟。今后工作包括将该方法扩展到其它感知任务中,例如自动驾驶中的里程计、自车运动估计和速度预测。我们希望这项工作能够提供有用的见解,并且推动基于激光雷达场景理解的多任务深度学习的持续研究。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

智能推荐
vue3背景下,el-input嵌套在弹出框中,自动聚焦“失效”?如何实现自动聚焦_vue3 el-input 自动聚焦autofocus无效-程序员宅基地
文章浏览阅读436次,点赞15次,收藏2次。原因或许是,使用autofocus时,确实聚焦了!但是当我们又点击 显示弹出框的按钮时,input又失焦了,所以当我们看到input框时,没有自动聚焦。_vue3 el-input 自动聚焦autofocus无效
linux网络服务配置说课,《说课稿LINUX》PPT课件.ppt-程序员宅基地
文章浏览阅读222次。《《说课稿LINUX》PPT课件.ppt》由会员分享,可在线阅读,更多相关《《说课稿LINUX》PPT课件.ppt(16页珍藏版)》请在装配图网上搜索。1、LINUX 基础应用与配置管理 桂林山水职业学院计算机系 朱笑雷 主要内容 课程定位 1 课程内容设置 2 教学方法与手段 3 教材建设 4 教学团度 5 主要内容 实践条件 6 课程考核 7 教学效果 8 课程特色 9 建设思路 10 一、课..._linux说课课件
在SpringBoot中启动时关于连接数据库失败的问题_springboot启动时数据库连接失败 不关闭-程序员宅基地
文章浏览阅读2.2k次。#在SpringBoot中启动时关于连接数据库失败的问题对照了application.yml,发现配置文件貌似没什么问题,但是在查找信息之后,发现问题正是出现在application.yml中问题出于datasource下的data-username和data-password只要将data-username和data-password改为username和password即可..._springboot启动时数据库连接失败 不关闭
antd-pro(V5)动态菜单_antdpro的菜单-程序员宅基地
文章浏览阅读4.6k次。一般情况下登录系统后菜单是由后端返回的,不是前端写死的。antd-pro也支持,修改的路径在app.tsx在 layout 里加一个menuDataRender字段先给一个() =>[]可以看到左侧菜单没了,说明配置生效了,接下来就可以围绕这个配置做文章了,我们先定义一个 menuDataRender方法。根据登录缓存到本地的数据做下处理,判断菜单里要展示哪些内容(比如替换字段,隐藏不显示的菜单,隐藏按钮等),处理好了后返回一个数组结构即可。示例代码如下export const layout: _antdpro的菜单
Linux安装使用jprofiler6分析服务器应用状态-程序员宅基地
文章浏览阅读77次。为什么80%的码农都做不了架构师?>>> ..._jprofiler6 key
苏小红C语言第四版课后习题练习7.7最大公约数三种计算方式_c语言程序设计第四版课后题答案苏小红第七章-程序员宅基地
文章浏览阅读170次。(可以看出递归算法更加侧重于计算的技巧,并且计算机计算的次数也相对更少);_c语言程序设计第四版课后题答案苏小红第七章
随便推点
Fiddler抓包,并修改请求数据_filder改数据包-程序员宅基地
文章浏览阅读4.4w次,点赞8次,收藏51次。浏览器抓包(工具:fiddler)并 修改请求内容 工具下载:https://pan.baidu.com/s/1pyKdAwgTdNNvoWA2bGlk9A 1、正常打开网页,输入要提交的内容 2、打开工具,f11暂停了页面的所有提交动作 3、这时再点击提交按钮,请求的数据就会被工具拦截 4、双击截取的数据,右侧会看到请求的具体内容,任意修改数据 5、点击绿色按钮 run ..._filder改数据包
视频格式转换器榜单:10 款最值得拥有的高清视频转换器_奇客视频转换-程序员宅基地
文章浏览阅读560次。如果您想在计算机或任何其他设备上播放高质量的视频,高清视频转换器可以帮助确保您的视频与您的操作系统和硬件兼容。您还可以使用高清转换器更改视频的分辨率,无论您是想提高质量还是降低分辨率以生成更小的文件。在下表中,我们描述了用于转换高清视频的最流行和可用的桌面程序和在线服务。它们各有优缺点,因此请根据您的需要进行选择。_奇客视频转换
Unity血条效果,图片动画_游戏血条动图-程序员宅基地
文章浏览阅读1.9k次。欢迎来到unity学习、unity培训、unity企业培训教育专区,这里有很多U3D资源、U3D培训视频,我们致力于打造业内unity3d培训、学习第一品牌。今天开始做我们的游戏了,组长给分配了任务,我负责做剧情动画,人物血条和种植植物。 一、剧情动画 动画是以多个图片的形式展现的,图片是自己制作的。 private GUITextu_游戏血条动图
环境变量的加载顺序、环境变量集合_环境变量的顺序-程序员宅基地
文章浏览阅读1k次。*******字符编码ASCII,GB2312,GBK,Unicode,UTF-8比较参考:https://blog.csdn.net/softwarenb/article/details/51994943**环境变量的加载顺序:Mac系统的环境变量,加载顺序为:a. /etc/profileb. /etc/pathsc. ~/.bash_profiled. ~/..._环境变量的顺序
科学家发现让人类幸福感飙升的密码!给大脑植入这个算法 | 精选-程序员宅基地
文章浏览阅读316次。▼大型年度AI人物评选——2017中国AI英雄风云榜已于12月4日在乌镇张榜,12月18日在北京国贸三期举行颁奖典礼。榜单评选出年度技术创新人物TOP 10;商业创新人物TOP 10,获取完整榜单请关注网易智能公众号(ID:smartman163),回复关键词“评奖”。本文系网易智能工作室出品聚焦AI,读懂下一个大时代【网易智能讯12月10日消息】不只有你会_人类大脑植入代码
正则表达式匹配中括号内的内容_正则<>里内容-程序员宅基地
文章浏览阅读3.6k次。几经研究, 终于实现了。time[2020-06-04 11:43:36](?<=\[)(.*)(?=])(pattern) 匹配 pattern 并获取这一匹配。所获取的匹配可以从产生的 Matches 集合得到,在VBScript 中使用 SubMatches 集合,在JScript 中则使用 $0…$9 属性。要匹配圆括号字符,请使用 '\(' 或 '\)'。 (?:pattern) 匹配 pattern 但不获取匹配结..._正则<>里内容